多智能体自主系统与实时规划有关的研究日益增多,本论文就是对这一研究的贡献。多年来,由移动智能体组成的自主系统已被证明是用于探索(如太空机器人)、军事(如搜救行动)和工业应用(如谷歌自动驾驶汽车)的高效、稳健和多功能工具。随着自主技术日趋成熟,部署多个自主智能体来完成复杂的任务在许多不同的应用中都受到了广泛关注。如果单个智能体可以完成一项任务,那么多个智能体就有可能更快地完成任务。然而,引入多个智能体会使整个系统变得更加复杂,因为现在的智能体需要能够有效地相互协作。在没有有效协作机制的情况下随机引入智能体,可能会对生产率产生负面影响。
本论文的研究目标是使多智能体自主系统在现实应用中无处不在。我们采用了自下而上的方法来开发算法机制,以应对我们在实现这一目标的道路上所面临的挑战。
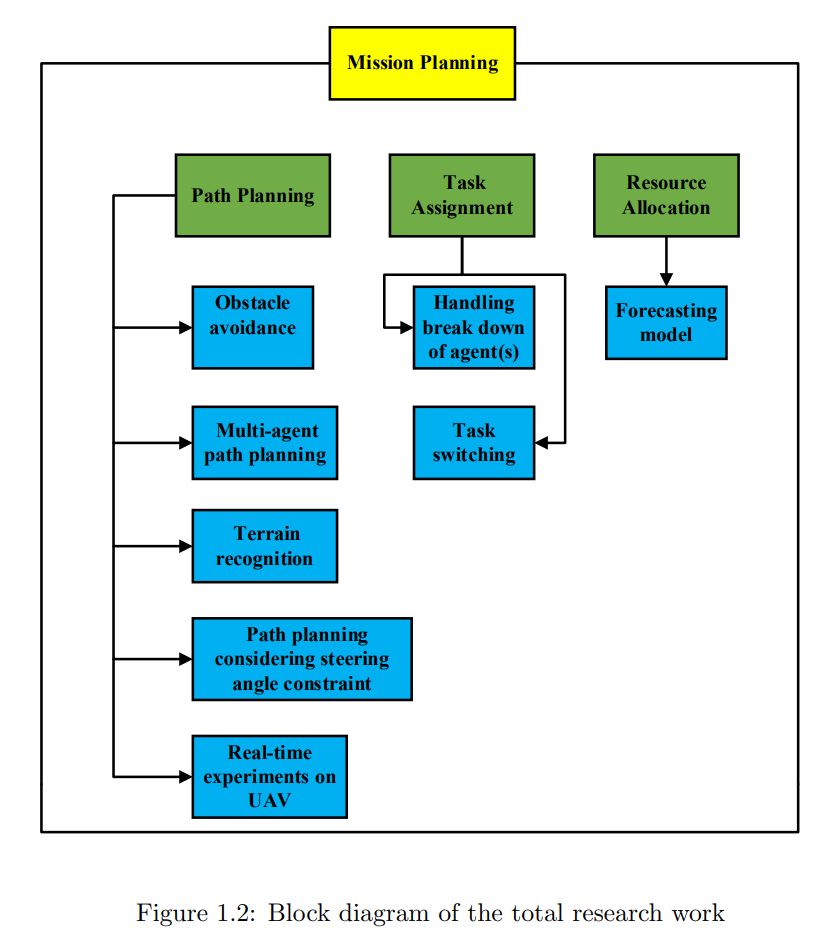
对于在动态环境中运行的智能体来说,能否成功执行任务取决于它能否有效地导航到目标位置。如果我们在环境中引入更多的智能体,路径规划的要求就会更高,因为现在智能体之间必须把彼此当作动态障碍物来对待。路径规划算法不仅需要避开障碍物,还需要足够快的速度,以便在移动智能体在导航过程中遇到意外障碍时重新规划。此外,路径规划算法还需要保证智能体能够在满足机械约束条件的情况下穿越路径。
我们开发了一种基于随机优化的同步重规划矢量粒子群优化算法(SRVPSO),通过避开静态和动态障碍物来找出成本最优的路径。所提出的算法通过应用同步重新规划策略,减少了路径规划的计算时间。SRVPSO 算法还能在一些车辆约束条件下工作,如车辆尺寸和转向角。此外,还开发了一种不同地形的可穿越性评估方法,以便在未知环境中进行无风险、稳健的导航,同时优化总成本。
由移动智能体群组成的自主系统需要一个有效的任务规划器来成功完成一系列任务。任务规划器所面临的挑战是如何为每个智能体确定最优化的任务数量和相关任务。为了解决多智能体自主系统任务规划过程中的任务分解和任务分配问题,我们开发了一个折中视图(CV)模型和一个基于最近邻搜索(NNS)的模型。结果表明,这些模型因其反应式管理结构而非常有效,能成功完成任务。NNS 模型能有效地解决智能体的分解问题。它还具有任务切换能力。
任务规划器的多目标优化框架可确定任务所需的智能体数量。任务规划器利用所开发的任务分解方法,最大限度地减少完成任务的时间以及智能体的数量。多目标框架的输出是帕累托最优值,然后将其作为决策框架的输入,根据用户定义的一些约束条件和优先事项确定优化的智能体数量。在测量完成任务的时间时,任务规划器利用先前开发的路径规划器模拟智能体在环境中的导航轨迹,以提供最准确的估计。
然而,正在进行的任务可能会受到突发事件的影响(如一些天气事件、智能体的意外维护要求等)。未来任务的规划取决于正在进行的任务,因为它提供了对资源可用性的估计。需要一个现实的预测模型,利用过去任务的信息,对当前任务的完成情况进行统计估计。
我们开发了一个基于人工神经网络的预测模型,根据以往任务的信息预测任务的完成时间。该预测模型旨在为潜在的任务规划者提供指导。利用这一数值模型,未来的规划者可以预测所需的资源,而无需经过优化过程。上述所有算法工具都通过大量的模拟结果和实时实验进行了演示。