无人机(UAVs)在军事领域的应用已经非常成熟,在现代战争中具有巨大优势。使用无人机蜂群的概念已经讨论了二十多年,但现在以色列国防兵力首次使用了真正意义上的无人机蜂群系统。无人机蜂群没有确切的定义,但有人提出它应满足以下三个要求。蜂群的人为控制应该是有限的,蜂群中的代理数量至少应该是三个,其合作执行共同的任务。控制多架自主无人机的复杂性带来了如何利用作战员的认知和战术能力来控制蜂群以有效执行军事侦察任务的问题。使用行为树作为控制结构的方法源自之前在蜂群系统方面的研究。行为树是一种组织自主系统行动并对其进行优先排序的结构化方法。行为树类似于有限状态机(FSM),具有模块化、反应灵敏、可读性强等优点。在游戏引擎 Unity 中创建并模拟了三种不同的行为树,其复杂程度不断增加。我们还创建了第四棵更为真实的行为树,并以此为基础讨论了使用行为树与之前工作的优缺点。使用行为树作为创建蜂群的统一结构,将操作员的战术能力与自主蜂群的力量整合在一起,似乎大有可为。我建议将所提出的使用行为树的方法用作讨论蜂群所需的功能的平台,并为作战员和工程师创建蜂群应如何运作的共同愿景。
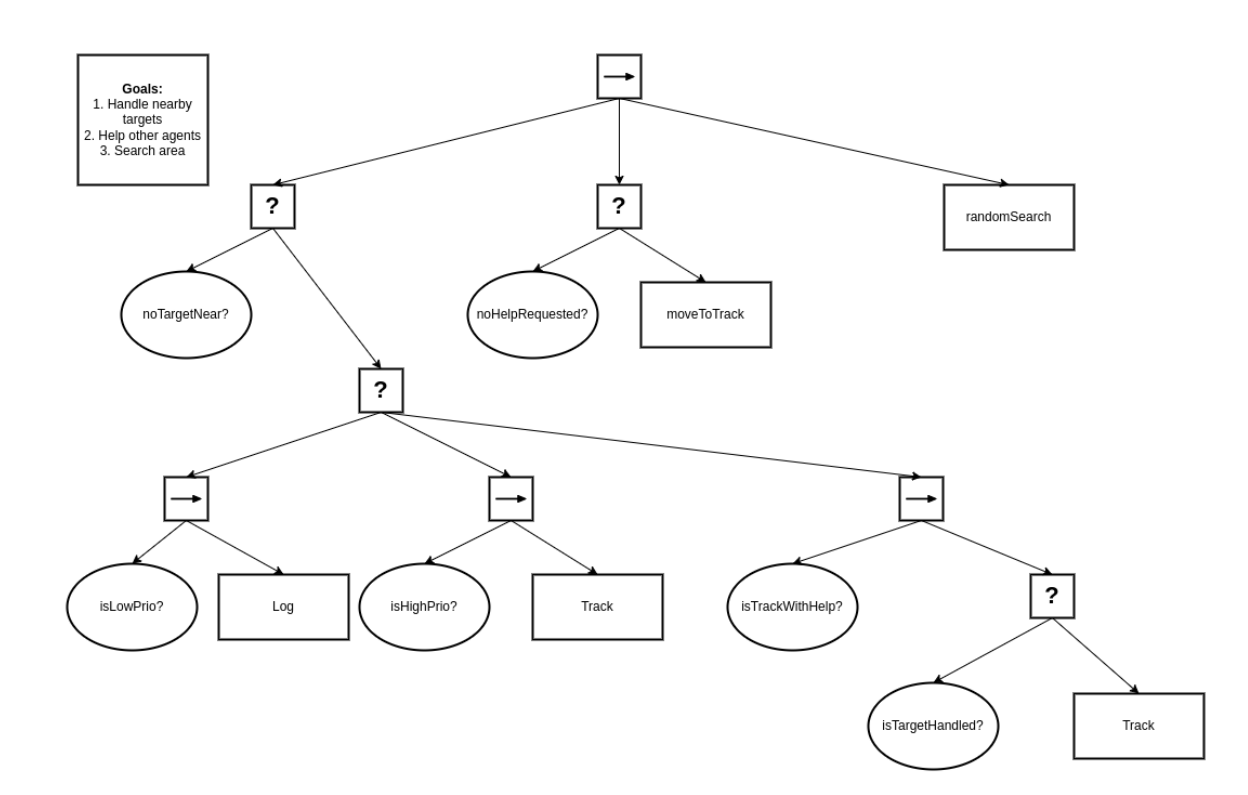
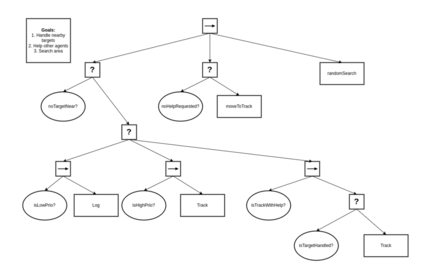
图 A.2. 用于逻辑模拟的第三行为树和预期目标的图形表示。
引言
无人驾驶飞行器的热度空前高涨。历史上,这些飞行器只能用于军事领域,如今,它们在公共领域有了新的用途。随着技术的不断成熟和普及,无人机的应用范围也在不断扩大。"蜂群 "和 "蜂群机器人 "的概念并不新鲜,但直到现在,支持这一概念的技术还没有出现。关于什么是机器人蜂群,目前还没有确切的定义,但 R. Arnold 等人[1]提出,机器人蜂群需要满足三个要求。一个蜂群应受到有限的人为控制,蜂群中的机器人数量至少应为三个,蜂群中的机器人应合作执行共同的任务。
支持无人机群的硬件已经具备,但如何控制无人机群还有许多问题有待解决。本硕士论文旨在研究如何利用操作员的认知和战术能力来控制蜂群,从而有效地执行军事侦察任务。这项工作着眼于如何将人类操作员与自主蜂群整合在一起,以及如何对如何做到这一点进行高层次的描述。
使用所谓的行为树来控制蜂群的方法是一种有趣的方法,我们对此进行了研究,并创建了三个模拟来进行测试。此外,还对照以前的工作对行为树方法进行了评估,以突出其优缺点。此外,还就如何在创建蜂群控制器时使用行为树提出了建议。
本论文的第一章包括引言,介绍了该领域的前人工作,并进一步描述了问题。第二章和第三章介绍了行为树和执行侦察任务背后的理论。第四章研究了使用行为树控制无人机群的方法。第五章总结了这项工作,并介绍了可能有意义的未来工作。