自主水下航行器(AUVs)是机器人平台,通常用于收集环境数据,提供测深图像,并执行操纵任务。这些机器人不仅用于科学,而且还用于工业和军事目的。气候变化、政治不稳定以及对可再生能源和化石能源日益增长的需求,使得人们对高性能AUV,特别是长距离AUV的需求。
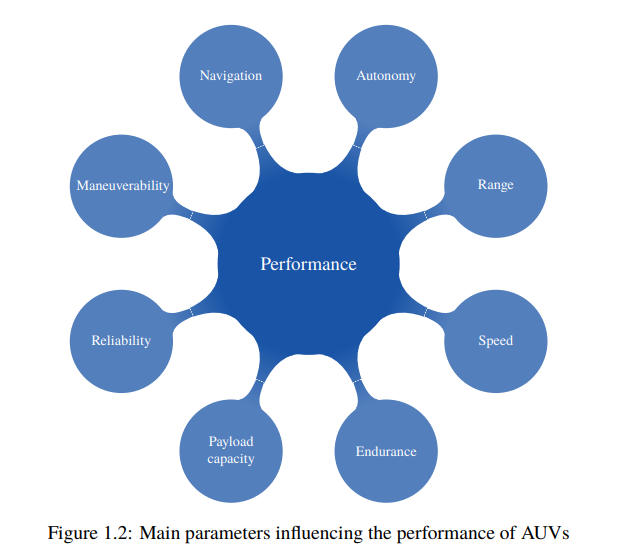
长距离AUV的性能由几个参数来描述,如自主决策、精确导航、系统可靠性和航行器续航能力。航行器的续航能力是实现长距离任务的关键能力,由能量容量和功率消耗决定。通过以最佳速度巡航,可以最有效地利用航行器的续航能力,从而实现最长的航行器航程。AUV的航程可以通过最大限度地提高可用的能量容量和最大限度地减少总功率消耗来延长。本论文展示了推进系统和动力源的选择如何有助于提高AUV的航程。
功率消耗包括旅馆负荷和推进功率。宾馆负荷主要取决于有效载荷的传感器,而推进功率可以通过选择正确的推进系统而最小化。作为本论文的一部分,使用分析方法分析了水下滑翔机的过境性能。该分析产生了一个用于评估水下滑翔机能源效率的滑翔指标,并允许与其他常规推进系统进行比较。
AUV最常见的能源系统是一次和二次电化学电池,特别是锂离子电池。替代能源系统,如燃料电池(FC)系统可以潜在地提高AUV的航程。通过一个使用现成组件的概念设计研究,显示了FC系统如何能增加AUV的能量容量。FC系统通常作为混合系统与小容量的电池系统配对实施。需要能源管理策略(EMS)来协调这两种电源。在这篇论文中,确定性的和基于优化的策略已经在模拟中进行了测试,并根据现场试验的现实AUV电力消耗数据进行了评估。结果表明,EMS的复杂性需要随着任务的复杂性而增长。虽然确定性方法可以为标准任务(如测深成像)产生最低的能量消耗,但基于优化的方法提供了最佳的负载跟随行为,使这些方法更适合于通过保持电池的充电状态来保持电源的可靠性。