清华大学微小型管道机器人登Science Robotics,实现亚厘米级管道高效探测
大数据文摘授权转载自机器人大讲堂
近日,清华大学机械系现代机构学与机器人化装备实验室研发了一种可在亚厘米级管道中高效运动的管道探测机器人。

这个不同寻常的设计灵感,来源于蚯蚓。

别看机器人个头小巧,用途可不小!本文将详细介绍它的工作原理、包含的关键技术以及未来的应用方向。
可在弯曲管道中行进的微型管道机器人
在航空发动机和炼油机等复杂系统中,有大量用于输送水、气体和油的管道。通常,这些管道具有各种直径、变化的曲率,并覆盖较长的距离。为确保它们处于良好的工作状态,需要定期从外部和内部进行管道检修。
然而,目前已开发的各种管道巡检机器人包括轮式、腿足式、履带式等运动机构,多采用电磁电机驱动,适用于大口径管道的检测。当涉及到直径小于一厘米的微细管道时,机器人的尺寸很难按比例缩小。
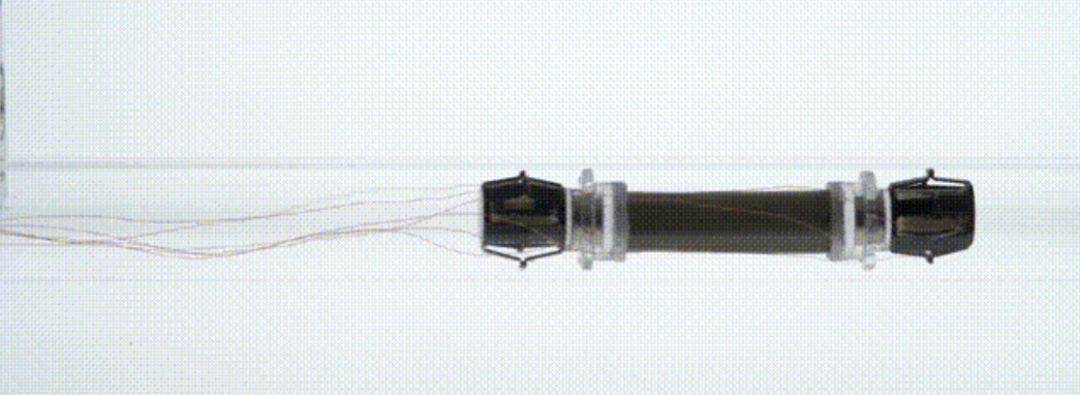
基于此项难题,该团队提出了一种智能材料驱动的微型管道检测机器人(重量2.2克,长度47毫米,直径 < 10毫米),可以适应亚厘米直径和变化曲率的复杂管道。
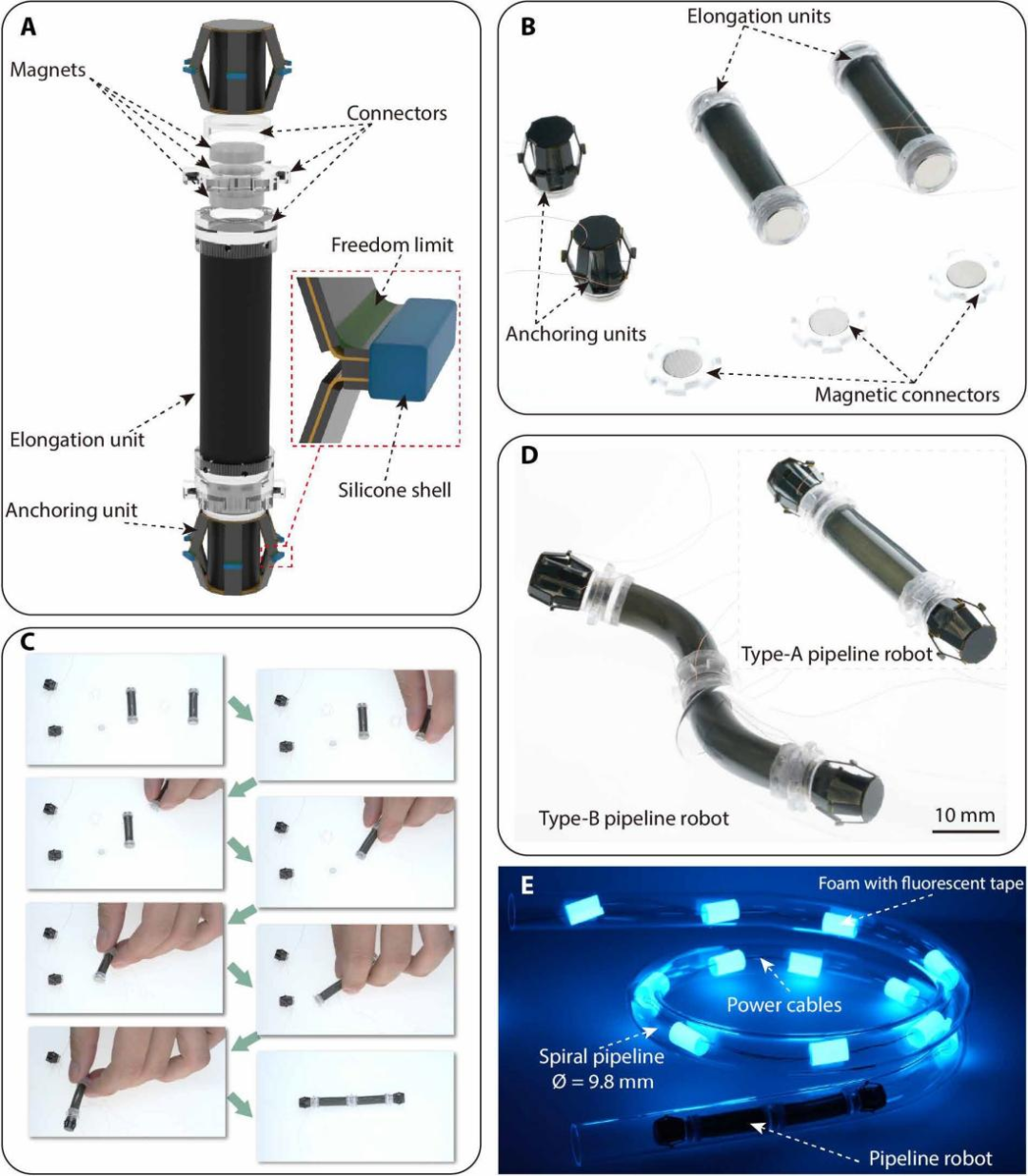
管道机器人的设计和组装
那么,如何运用技术手段来创造这类型的机器人呢?
关键就在于——足够强大且足够小以驱动机器人在管道中快速移动的人造肌肉(或称为“软致动器”或“介电弹性体致动器”)。
如何最小化尺寸以适应亚厘米管道并仍然实现有效运动,以及如何设计传动装置以适应各种管道,是最大的挑战。
这个机器人采用高功率密度、长寿命的介电弹性体致动器作为人造肌肉,采用基于智能复合微结构的高效锚固单元作为传动装置,使用具有可调节数目的磁单元来快速组装机器人,以适应不同管道的复杂几何形状。
同时,团队的研究人员通过考虑软材料的独特特性(如粘弹性和动态共振)来分析机器人的动态特性,并相应地调整驱动电压的频率和相位,以优化机器人的运动速度。
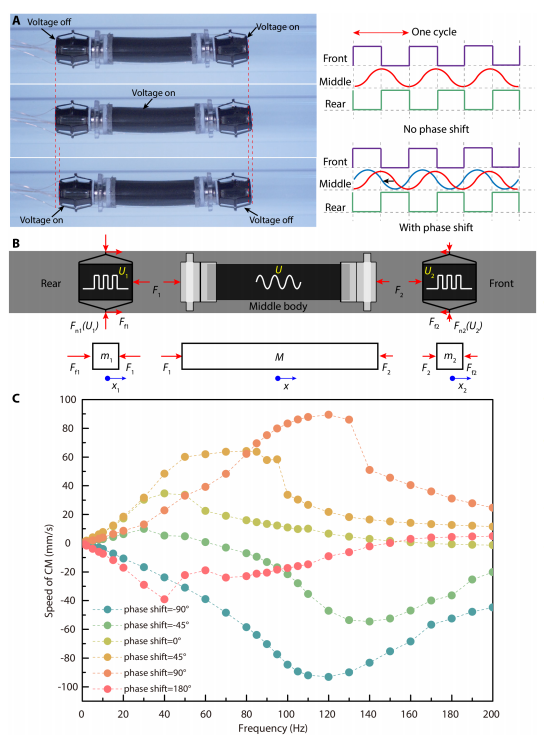
A型管道机器人的运动分析。(A)机器人在一个周期内的基本运动和驱动信号。(B)机器人独立部件的自由体图。(C)机器人CM模拟速度的频率和相位图。
外部缆线提供动力,实现快速运动
此外,这个基于高频蠕动运动原理的管道机器人由外部的缆线来提供动力,在亚厘米大小的管道中实现了水平和垂直快速运动(速度:1.19身长 / 秒)。
水平运动
垂直运动
同时,它还能够在不同几何形状的管道(变径管、L 形管、S 形管、螺旋形管等)、不同的填充介质(空气、油等)和不同材质(玻璃、金属、碳纤维等)的管道中高速行进。
L 形管道
螺旋形管

机器人在充满液态油的管道中和在碳纤维制成的管道中航行
为了验证其管道检测能力,机器人正面安装了一个微型摄像头,从外部控制该机器人,机器人以不同的速度成功完成了一组管道巡检任务演示。
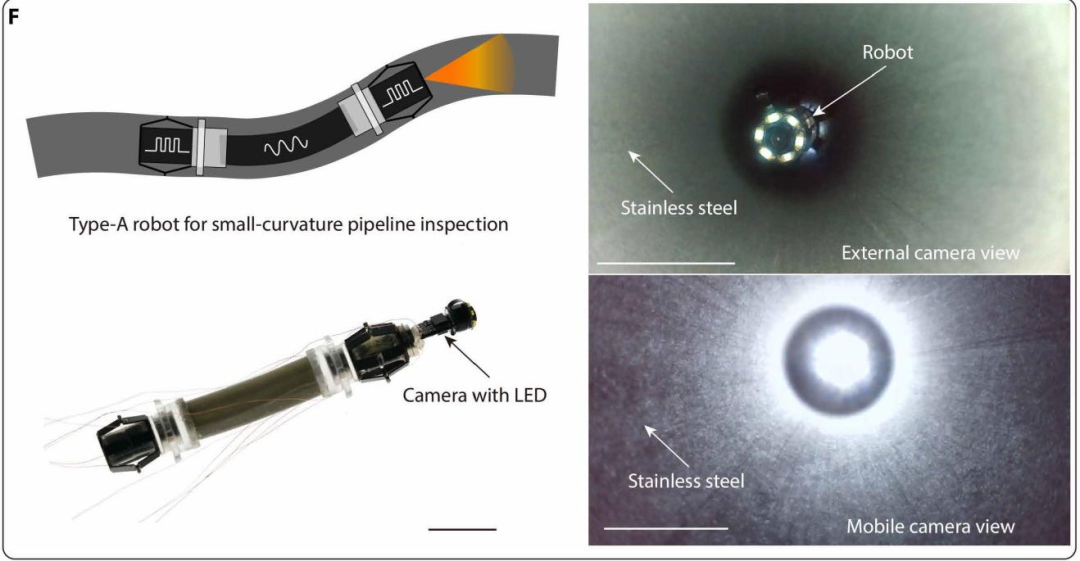
机器人的图像,前面安装了摄像头,机器人在不锈钢管中以1 Hz的驱动频率检查环境。比例尺,10 mm。
有望在航空发动机管路检修等领域发挥作用
上述科研成果以“用于亚厘米级管状环境导航的管道检测机器人”(A pipeline inspection robot for navigating tubular environments in the sub-centimeter scale)为题发表在《科学・机器人》(Science Robotics)上。
论文第一作者为清华大学机械工程系博士后汤超,他博士毕业于西安交通大学机械工程学院,导师为陈花玲教授。2020年6月加入清华大学机械系现代机构学与机器人化装备实验室从事博士后研究,合作导师为赵慧婵副教授,主要研究方向为智能材料与结构、软体机器人。

汤超 清华大学机械系 博士后
论文通讯作者为机械工程系副教授赵慧婵,其他作者包括机械工程系教授刘辛军和 2021 级博士生杜伯源、2018 级博士生姜淞文、2019 级硕士生邵琦、2019 级博士生东旭光。该团队多年来一直专注于机器人领域相关研究。
在此项研究中,研发团队向我们展示了使用智能材料和结构快速组装和构建栓系、亚厘米直径管道检测机器人的可行性。与其他类型的管道机器人相比,该管道机器人具有更高的环境适应性。
当前的飞机发动机检查方法非常耗时,并且需要高技能的工程师。研究团队希望可以将这样的机器人放入飞机发动机的管道中,让机器人在管道中一直导航到最后,同时将沿途的所有图像发回,以节省人们的时间和精力。
这项研究有望在航空发动机管路检修等领域发挥作用。
本项工作受到了国家自然科学基金青年基金、面上项目以及共融机器人重大研究计划等项目的支持。
论文地址:
https://www.science.Org/doi/10.1126/scirobotics.abm8597





