该项目的主要目标是开发和演示传感器、数据采集和其他设备,以利用商业现货(COTS)无人潜航器(UUV)进行水下电势(UEP)和磁性特征测量。
ONR向Riptide Inc.订购了一个UUV,作为COTS UUV,用于与该研究项目一起进行UEP和磁信号测量。完成的航行器没有交付给ONR,Riptide公司于2019年7月5日申请破产。BAE系统公司收购了Riptide公司,并表示他们打算履行对ONR的原始订单。但该航行器没有交付给ONR,随后无法使用。为了给这个项目获得一个COTS UUV,决定使用未使用的旅行/测试资金从BAE系统公司购买一个鼻锥和尾锥,与2018年购买的传感器和电池部分相结合。在得到ONR的许可后,向BAE系统公司订购了机头和尾锥,并于2019年9月3日收到首付款。这些部分已于2020年2月24日交付给UI。这些部分被组合成一个完整的激流勇进1MP,见2019年RPPR的图1.3,用于现场测试。
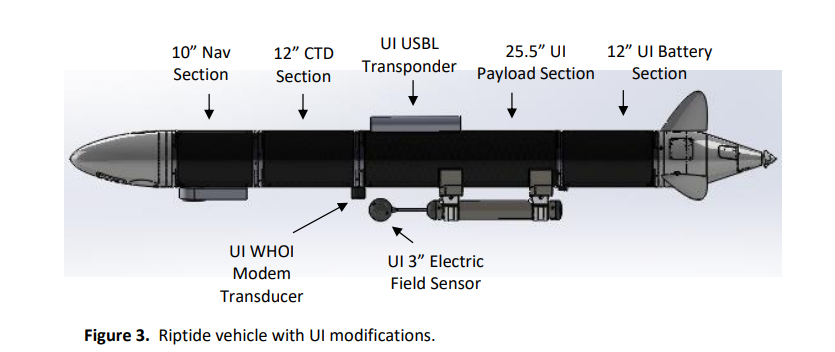
该项目成功地展示了使用UI研究用的UUVs在海洋环境中进行UEP和磁特征测量。在SFOMF进行的现场测试成功地证明了UUVs可以在5 n-特斯拉范围内进行磁场测量。UI研究小组开发了一个用于进行UEP测量的电场传感器。经过多次设计和测试,电场传感器的最终版本是一个直径为3英寸的球状传感器,具有3轴Ag/AgCl电极对,并配有UI设计的嵌入式低噪声前置放大器。UI团队还研究和开发了一个填料床碳电极传感器的原型。
使用Riptide UUV测量磁场和电场数据的方法主要集中在开发独立的传感器模块(SASM),该模块可以安装在任何COTS UUV上,并在仪器有效载荷部分安装一个基于NI-DAQ的系统,作为SASM证明无效的备份。防水的SASM已经建成,并在UI的实验室环境中和在ARD的水中安装在UI AUV上进行了测试。该SASM能够以5K SPS记录6个通道的24位数据,允许同时记录内部比林斯利三轴磁通门磁力计和UI开发的三轴电场传感器。此外,SASM包括一个Memsense IMU,记录速率为100 SPS。该系统由至少四节标准9V电池供电,可以安装在几乎任何COTS UUV上。SASM的长度为30英寸,直径为2.5英寸。
最终版本的SASM在UI的水箱测试中成功地展示了本底噪声小于1uVrms/m的Ag/AgCl电极。