
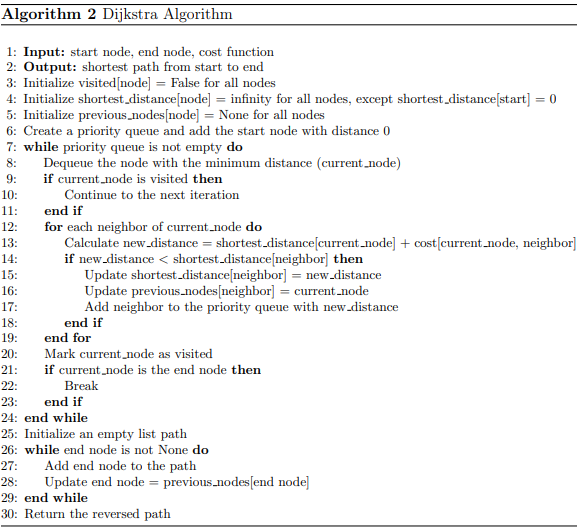
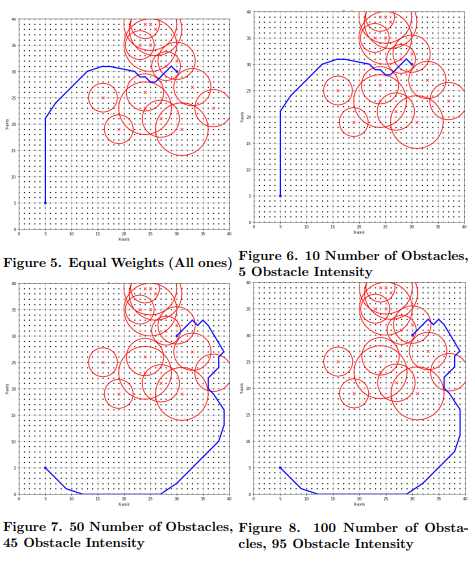
本文深入探讨复杂环境下的先进导航策略,其应用场景涵盖城市后勤至反介入/区域拒止(A2AD)背景下的军事行动。研究聚焦于障碍密集环境下的路径规划挑战,通过运用Dijkstra算法等系列算法优化路线生成。研究成果凸显了可互换成本函数的适应性优势——该特性对于定制化应对不同场景(无论是自动驾驶车辆的障碍规避还是军事机动策略)具有关键作用。通过分析算法与成本函数的组合效能,研究揭示了若干优势组合方案,为提升路径规划与作战策略提供重要洞见。这些发现有助于提升军民领域的安全性与运行效率。研究不仅深化了对动态环境下寻径机制的理解,更为未来基于Python仿真与AFSIM平台的高效导航技术发展奠定基础。
本文通过双重聚焦研究,深入探讨最短路径算法在军事与民用领域的实际应用。通过构建两篇独立文章,本研究旨在建立统一框架以应对各领域特有挑战。通过剖析军事反介入/区域拒止(A2AD)环境与障碍密集的民用场景中路径规划的复杂性,研究致力于为多场景适应性解决方案奠定理论基础。首篇论文(第二章)聚焦民用领域,重点研究障碍密集环境下的导航问题;次篇论文(第三章)则着力解决军事环境中遭遇的复杂挑战。
成为VIP会员查看完整内容
相关内容

Arxiv
40+阅读 · 2023年4月19日
Arxiv
210+阅读 · 2023年4月7日
Arxiv
79+阅读 · 2023年4月4日
Arxiv
142+阅读 · 2023年3月29日
相关主题
相关VIP内容
相关资讯
相关论文
Arxiv
40+阅读 · 2023年4月19日
Arxiv
210+阅读 · 2023年4月7日
Arxiv
79+阅读 · 2023年4月4日
Arxiv
142+阅读 · 2023年3月29日