多机器人协调与协作是提升团队能力、实现自主建造、农业及广域未知环境长期作业等新任务的关键行为。本研究聚焦多机器人资源分配问题背景下的此类行为,即机器人需被分配至服务区域。我们特别关注适用于大规模机器人集群的容错方法,引入一种基于图建模的多机器人资源分配框架,该框架在表征区域间关系与奖励模型方面具备前所未有的丰富性。首先解决多智能体覆盖控制问题,通过图神经网络(GNN)实施基于图的计算,利用学习型智能体间通信策略实现性能与可扩展性提升。随后针对需显式协调协作的复杂多任务场景,提出基于网络流的规划方法,可在数秒内生成大规模问题的高质量解。我们将此方法扩展至在线环境,实现任务失败与意外观测条件下的动态重规划。实验证明,这些建模方法与算法通过挖掘多机器人问题中的基础图结构,推动技术前沿的进步。
第一章
本章将研究工作置于多机器人资源分配领域进行定位。首先提出多机器人资源分配问题的分类体系,沿任务表征抽象维度梳理问题建模与对应方法(1.3节)。随后深入综述推动本研究中覆盖控制与任务分配工作的核心文献(1.5与1.6节)。
第二章:基于图神经网络的多机器人覆盖控制
本章提出一种新型有限感知半径多机器人覆盖控制方法,相比传统基线控制器,通过智能体间通信提升性能与鲁棒性。我们在机器人通信网络上部署图神经网络(GNN),训练其预测中心化全知控制器的控制指令,从而获得能通过智能体间通信应对覆盖控制难题的控制器。实验验证该方法在性能、扩展性与泛化能力上的优势。2.6节展示基于全球城市特征数据构建的覆盖控制数据集,用于算法验证。本研究首次将GNN学习控制器应用于多机器人覆盖控制,展现该路径的广阔前景。
第三章:具备任务优先级关系的多机器人协调协作
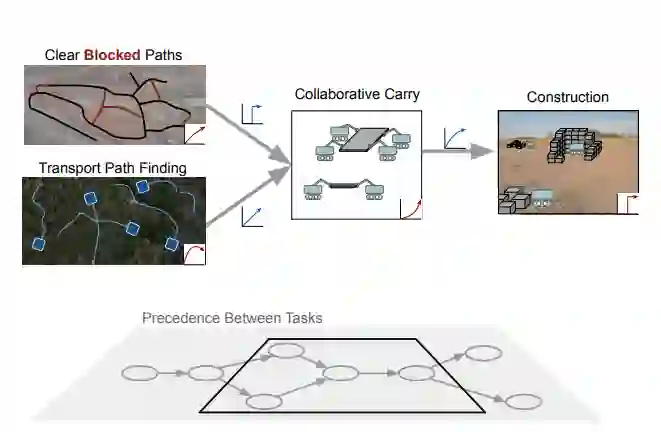
本章以新型建模框架与解法体系解决多机器人任务分配(MRTA)问题。提出"任务图"建模框架:将任务抽象为图节点,任务间优先级关系抽象为边;构建包含任务关联性能与编队规模-任务效能关系的奖励模型。该框架启发基于网络流优化的机器人任务分配解法,实验表明其求解速度较现有方法提升数倍,且计算复杂度与机器人数量无关——可扩展至无限规模团队。本研究对任务分配建模框架作出基础性贡献,实现求解速度的量级突破。
第四章:在线环境下的多机器人协调协作
本章将任务图模型与流解法扩展至在线环境,提升系统鲁棒性与性能,并通过高精度仿真验证。核心在于处理含不确定性的MRTA问题:任务可能随机失败或产生预期外奖励。利用流解法的高速求解特性,建立迭代重规划机制,依据已完成任务的奖励观测动态调整方案。实验证明该方法在不确定性环境中显著提升规划性能,零误差条件下亦因解空间扩展而优化。通过高精度城市多智能体仿真验证离线/在线流解法,测量仿真物理现象衍生的任务奖励。结果表明,本建模方法在复杂不确定任务中有效预测性能,且显著优于文献现有方法。在线机制增强系统鲁棒性,使性能逼近最优,为任务分配领域后续研究提供极具潜力的框架。