
本文探讨了无人地面车辆(UGV)应用中的 2.5D 和 3D 路径规划。对于 2.5D 实时导航,我们研究了使用高程或可穿越性生成 2.5D 占位网格,以确定路径成本。与海拔高度相比,使用由表面法线生成的分层方法生成的可穿越性在测试环境中更为稳健。分层方法也用于三维路径规划。虽然可以实时使用三维方法,但生成三维网格所需的时间意味着,有效进行路径规划的唯一方法是使用预先存在的点云环境。因此,我们探索从各种来源生成三维网格,包括手持式传感器、UGV、UAV 和航空激光雷达。
本报告涉及《陆军多域情报: 21-22 财年科技重点领域》(参谋部副参谋长办公室,2020 年)。具体而言,在传感器部分,本报告与以下需求相关: "传感器和机器人平台的新组合,不仅能在地形上移动,还能机动感知"(4)。传统上,无人地面车辆(UGV)以二维方式导航,并将世界划分为已知、未知和障碍。本报告试图通过在地图中加入实际地表信息,将导航扩展到 2.5维和 3维尺寸。更高的维度可以提高导航效率。
这项工作还涉及 "战争将以超高速、超大规模进行,由机器人和自主系统 (RAS)、机器学习 (ML) 和 AI [人工智能] 能力等技术主导,这些技术可广泛获得、打包并随时投入使用"(参谋部副参谋长办公室 2020,5)。虽然不在本文讨论范围之内,但基于前沿的 2D 探索软件包(Christie 等人,2021 年)将与我们的 2.5D 方法配合使用。

研究方法
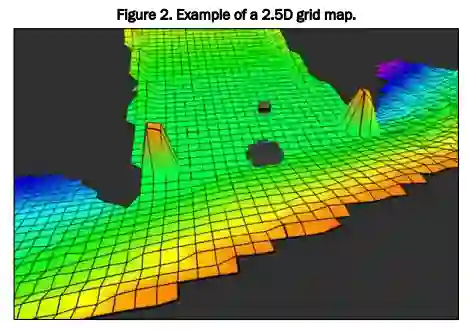
在这里,探讨了两个专门用于 2.5D 和 3D 导航的 ROS 软件包。为了生成 2.5D 占位网格,我们使用了 grid_map 软件包(Fankhauser 2019;Fankhauser 和 Hutter 2016)。虽然 grid_map 软件包最初是为腿式机器人导航各种地形而设计的,但它也可用于 UGV 平台,以维护地表信息。图 2 显示了网格地图的一个示例。通常,我们使用三维激光雷达生成网格图。不过,这里的网格图是 2.5D,这意味着我们用一个值来表示 z 方向。如果点云提供的两个不同坐标的 x 值和 y 值相同,但 z 值不同,则网格图会保留较高的 z 值。紫色和蓝色等冷色表示海拔较低,红色和橙色等暖色表示海拔较高。grid_map 软件包提供了多种有用的转换格式,包括 costmap_2d、OpenCV、OctoMap、点云库 (PCL),甚至是有符号距离场 (SDF)。costmap_2d 转换与我们的导航最相关。不过,在调整参数时,查看 pointcloud2、Vectors 和 GridCells 数据的功能特别有用,因为它们都有自己的参数文件,可以根据具体情况进行调整。
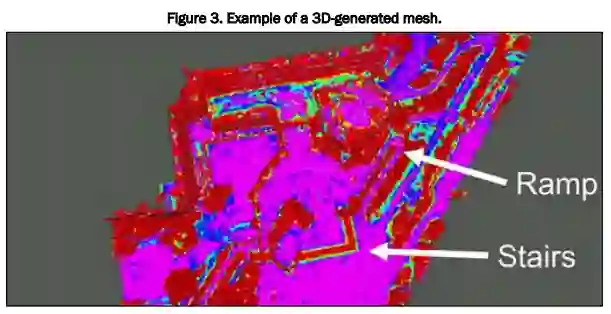
还研究了用于三维路径规划的 mesh_navigation(Pütz,2019 年;Pütz 等,2021 年)。图 3 包含一个网格导航示例。在这个示例中,粉色和蓝色等冷色调表示可穿越的地形,而红色则表示障碍物。使用网格导航的一个好处是,陡坡(即负面障碍物),如楼梯,会被标记为红色并避开。因此,机器人的路径是沿着斜坡规划的。
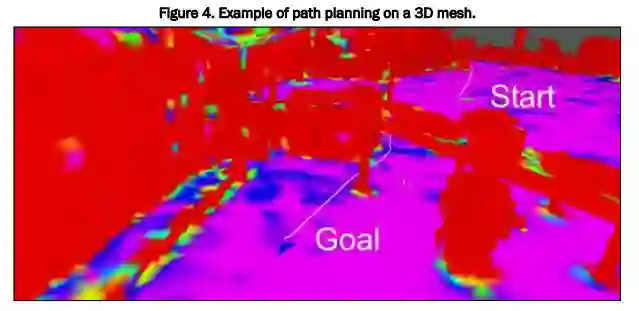
使用网格导航的另一个优势是,路径是沿着实际网格规划的,因此很容易识别和避免缝隙和陡坡。此外,航点可以有不同的 z 值,规划器会明确考虑这一点。例如,在图 4 中,起点位置海拔较高,而目标位置海拔较低。因此,网格导航可以使用最能实现海拔高度变化的路线,成功地将机器人引导到目标位置。而 2D 或 2.5D 方法则无法做到这一点。
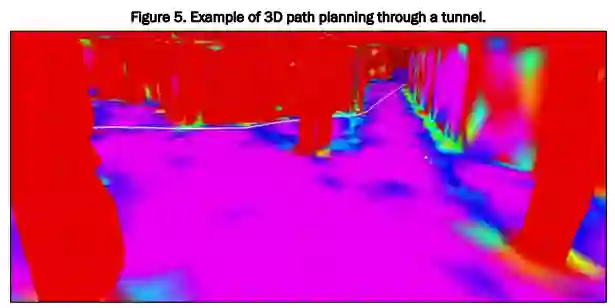
此外,如图 5 所示,网格可以沿同一 Z 轴存在多个点。这也是 2D 或 2.5D 方法无法实现的。图 5 还表明,mesh_navigation 软件包可以有效地利用三维网格来规划隧道路径,以达到预定目标。
本节中的图表使用在线数据集生成(奥斯纳布吕克大学,2020 年)。不过,本报告的其余部分将重点介绍从各种输入源生成可穿越网格的情况。
