近年来,无人机因其小巧灵活、智能自主等特点被广泛应用于民用 和军事等领域中,特别是搜索侦察过程中首要的目标跟踪任务。无人机 视觉目标跟踪场景的复杂性和运动目标的多变性,使得目标特征提取及 模型建立困难,对目标跟踪性能带来巨大的挑战。本文首先介绍了无人 机视觉目标跟踪的研究现状,梳理了经典和最新的目标跟踪算法,特别 是基于相关滤波的跟踪算法和基于深度学习的跟踪算法,并对比了不同 算法的优缺点。其次,归纳了常用的目标跟踪数据集和性能评价指标。 最后,展望了无人机视觉目标跟踪算法的未来发展趋势。
近年来,无人机凭借其体积小、动作灵活及易于 操控等特点,在民用、军事以及科学研究等多个领域 得到越来越广泛的应用,例如,恶劣环境下的电力线 路检测、大气环境检测、抢险救灾、侦察敌情、敌方 目标跟踪、搜索战场情报等[1-6] 。在无人机的诸多 任务类型中,无人机目标跟踪有着重要的研究意义, 并逐渐成为目前无人机领域热点研究方向之一[7-8] 。**无人机的目标跟踪能够通过多种方式来实现,比如,在跟踪目标上绑定电子标签或安装 GPS追踪 器来辅助跟踪,但该类方法需要与目标进行近距离 接触,在实际跟踪任务中往往难以做到。**随着计算 机视觉技术的飞速发展,基于视觉的无人机目标跟 踪已成为最接近人类行为且最为直观的跟踪形式。 具体地,视觉目标跟踪是指在给定某视频初始帧中 感兴趣区域(如人、车辆等)的情况下,对视频中的 运动目标进行特征提取,根据提取到的目标特征来 预测未来时间帧中运动目标的位置和大小,从而完 成对目标的追踪任务[9-11] 。
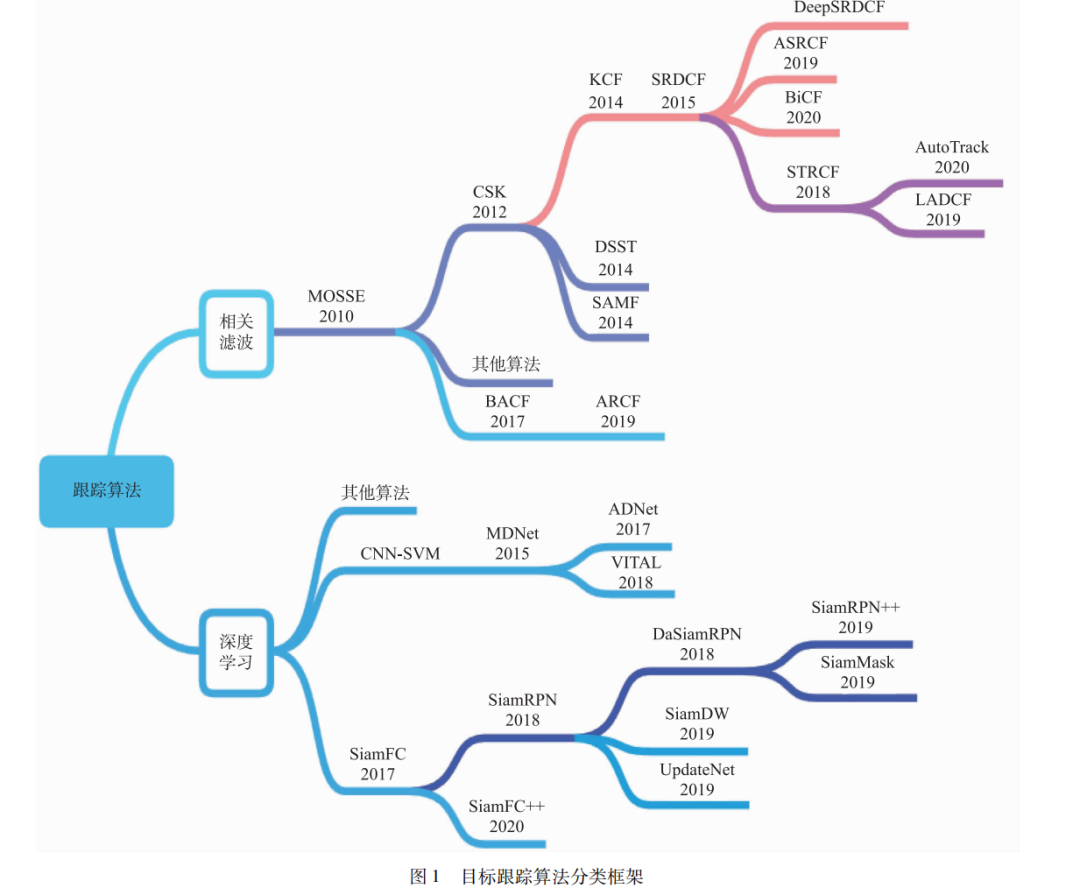
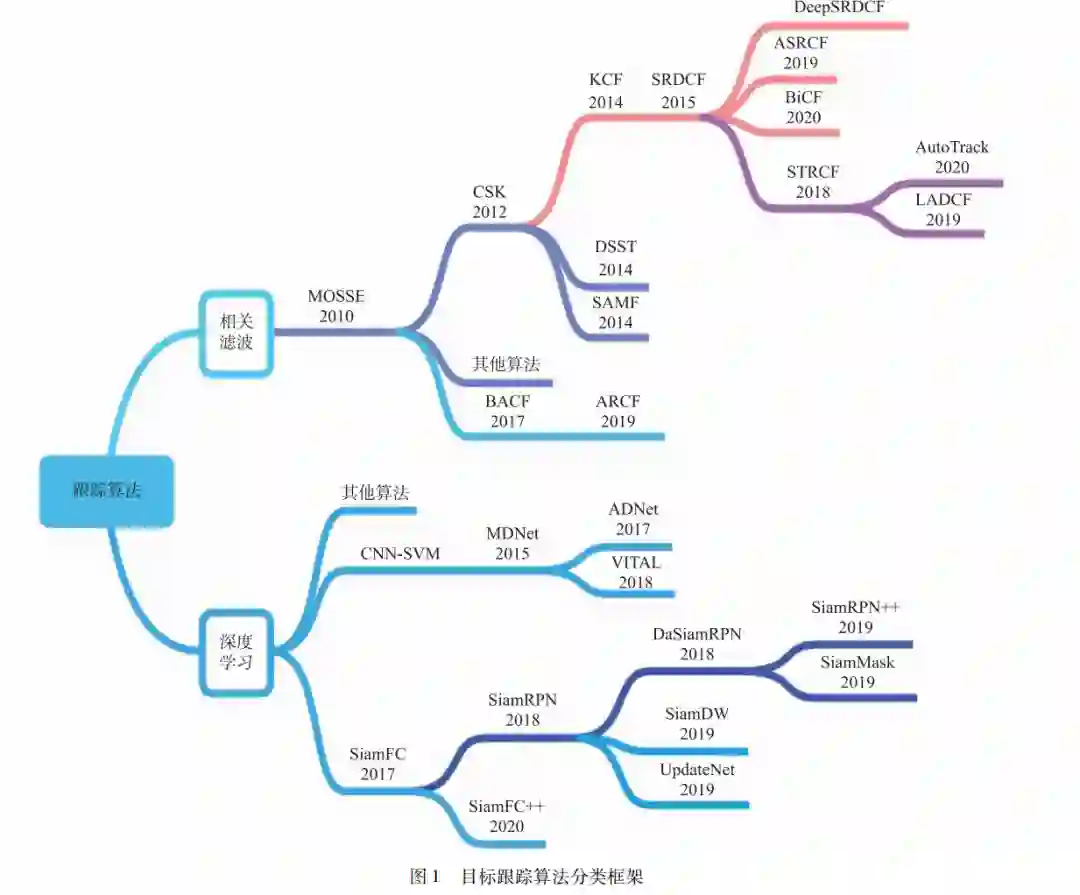
无人机视觉目标跟踪与地面目标跟踪相比,面 临着 4个挑战:1)由于空中视野广阔,干扰物体数 量较多,目标与其他物体之间、目标与背景之间相 互干扰,可区分性差,导致目标模型的可辨识性和 排他性不高,建立精准的目标模型较困难。2)当 无人机飞行在一定高度时,图像影幅变大,分辨率 和清晰度变低,地面上的待跟踪目标尺度变得很 小,目标特征和纹理变得稀少,使得目标特征提取 困难,特征表示不显著,导致目标检测和跟踪难度 变大。3)无人机在跟踪过程中易受到风力等外界 因素的影响,导致相机抖动、视角变化、运动模糊 等现象频繁,从而易产生跟踪漂移和丢失的情况, 实现鲁棒、稳定、长时的无人机目标跟踪较为困 难。4)由于无人机自身结构特点,大多数无人机 仅有一个 CPU,计算资源有限,无法承受复杂度太 高的运算,如何在保证精度的情况下开发复杂度低 的跟踪算法是极具挑战的。随着无人机技术的发展 和计算机信息处理能力的提升,尽管无人机视觉目 标跟踪算法有了突破性进展,但由于上述难点的存 在,无人机视觉目标跟踪算法仍有很大的发展空间。 视觉目标跟踪方法主要分为生成类跟踪方 法[12-13] 和判别类跟踪方法[14-16] 。生成类跟踪方法 通常忽略背景信息的影响且假设目标外观在一定时 间内保持不变,故该方法无法处理和适应复杂的跟 踪变化。判别类跟踪方法,尤其是基于相关滤波和 基于深度学习的算法,在一定程度上解决了样本不 足的问题,且能够提取目标中更多有用信息,显著 提高目标跟踪准确率和速度。判别类跟踪算法出现 之后,经典的生成类跟踪算法逐渐淡出,其主要原 因是因为这些算法无法适应复杂多变的跟踪场景, 其鲁棒性和准确性被前沿算法所超越。然而,由于 上述目标跟踪挑战的存在,判别类跟踪算法仍存在 一些不足。为了构建一个更精准、更高效且更鲁棒 的通用跟踪器,未来研究应重点关注高效的在线训 练和失跟后的重新检测机制,提高目标被完全遮挡 后的跟踪效果,同时,应关注如何引入迁移学习和 对抗学习等前沿方法来提高特征提取有效性,提高 算法对低分辨率的小目标的跟踪性能,从而应用于 机载无人机来完成实时跟踪任务。文[1]重点对无 人机目标跟踪算法的共同框架进行了详细描述,分 析了现有技术的不足,并提出了目标跟踪未来的发 展方向。文[16]系统地介绍了基于生成类和判别 类的视觉目标跟踪算法,但未涉及目标跟踪效果的 相关评估标准,且未对无人机空中监视场景中的难 点进行分析。为使相关研究人员对无人机视觉目标 跟踪领域的研究有更加清晰深入的了解,本文结合 无人机自身结构特点,首先对应用于无人机领域的 目标跟踪算法进行了梳理总结,分析了各算法的核 心思想及优缺点。其次,考虑到跟踪算法在无人机 平台上的应用前景,重点对基于相关滤波的跟踪算 法和基于深度学习的跟踪算法进行了详细介绍,阐 述了各算法的特点和贡献,并对比了各算法的跟踪 效果,图 1为两类目标跟踪算法的分类框架图,图 中所涉及的算法缩写及其全称如表 1所示。接着, 归纳了无人机目标跟踪领域的跟踪数据集和跟踪性 能评价标准。最后,对全文进行了总结,并对无人 机视觉目标跟踪的发展方向进行了展望。