
在布满障碍物的公路网中进行军事路线规划是一个复杂而耗时的过程,需要规划人员考虑时间和资产分配等多种因素。随着行动的节奏和动态性不断加快,规划人员越来越难以跟上直觉和人工计算的速度。由于战争迷雾导致信息不完善,计划人员往往不得不假设敌方可能采取的各种部署战术障碍的情况。这就带来了一个额外的难题,因为一种情况下的最优解可能是另一种情况下的次优解。我们提出了一种允许节点改进的场景稳健型路线规划和网络重组模型(SRRPNRM)。这些节点改进代表工程资产的行动,用于清除道路网络中的战术障碍。然后,我们将 SRRPNRM 应用于具有两种假设情景的网络,通过比较 SRRPNRM 的结果和预期值解决方案来确定模型的价值。结果表明,SRRPNRM 可帮助规划人员在多个潜在场景中就最优路线和初始资产分配计划做出明智决策。
在常规战争中,防御方通常使用战术障碍来阻止进攻方的自由行动。俄乌冲突就是一个例子,俄军在冲突中部署了长长的雷区、反坦克壕沟和其他各种障碍物,成功阻止了乌克兰军队向俄军控制区的推进。然而,这些障碍并非万无一失,攻击者可以利用专业工程设备清除。因此,在计划通过受防御的公路网实施进攻行动时,计划人员要依靠直觉和人工计算来确定部队的部署位置、专业工程设备的分配、各部队到达目的地的路线以及沿途需要清除的障碍。这种手工操作如果做得彻底,则需要耗费大量的人力和时间。此外,由于战争迷雾导致信息不完善,计划人员不确定部署的每个障碍的类型和位置是很常见的。由于信息不完善,计划人员需要推测对手的障碍物部署计划,并手动调整自己的移动和部署计划,以应对所有可能的行动。
本文制定了一个场景可靠的路线规划和网络重组模型(SRRPNRM),它将使这一过程自动化,并减少规划人员制定行动方案所需的时间。SRRPNRM 将模拟友军在专业工程设备支持下通过防御道路网的行动。在道路网络中,被拦截的节点不允许任何移动,这代表了对手设置的战术障碍。我方部队能够利用专业工程设备重建这些被阻断的节点,并恢复这些节点的通行。SRRPNRM 为己方部队的部署地点、所有场景下的移动路线以及专业工程设备的障碍清除计划提供了一个适用于各种场景的解决方案。
通过使用一个假设问题来测试 SRRPNRM 的有效性,发现 SRRPNRM 包含了与每个场景相关的不确定性,并相对较快地改进了非随机解决方案。它还能生成攻击部队的最佳部署位置、特定场景的移动路线和特定场景的障碍清除计划。SRRPNRM 可作为规划人员的有用工具,使制定攻势作战的健全场景计划的过程自动化。由于 SRRPNRM 具有通用性,因此可用于解决不同道路网络上的类似问题。未来的工作可以探索利用 SRRPNRM 的结果作为多智能体模拟或战争游戏的基础,以测试和验证所提供解决方案的可行性和稳健性。

图 1.1. 2022 年 4 月 1 日俄罗斯占领的乌克兰领土地图。地图线条图例见图 1.2。资料来源:ISW (2024)
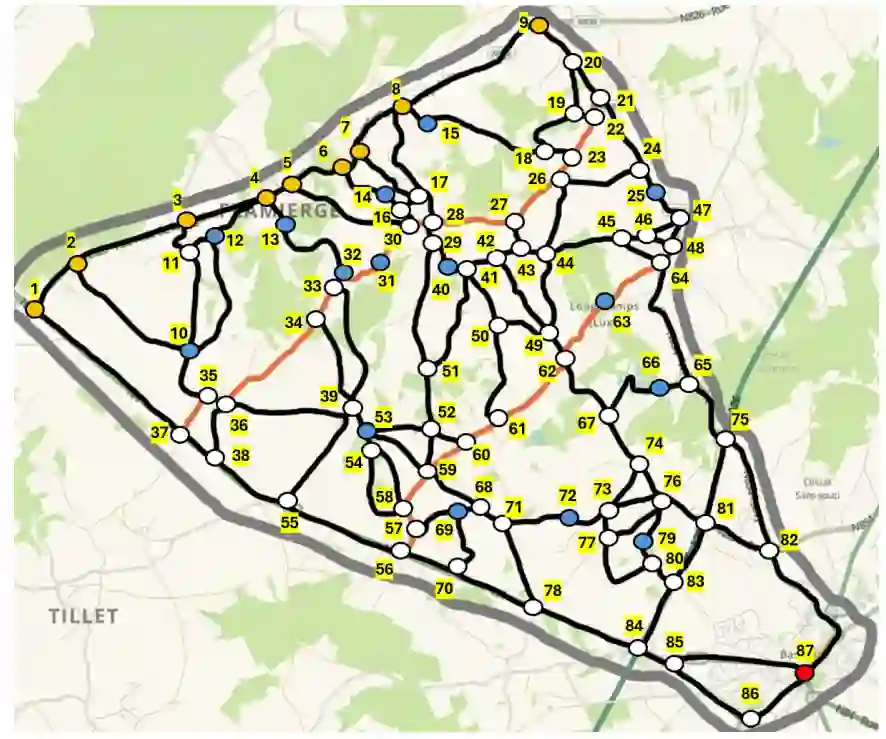
图 4.1. 进入巴斯通的公路网。改编自 Google (2024)。

