

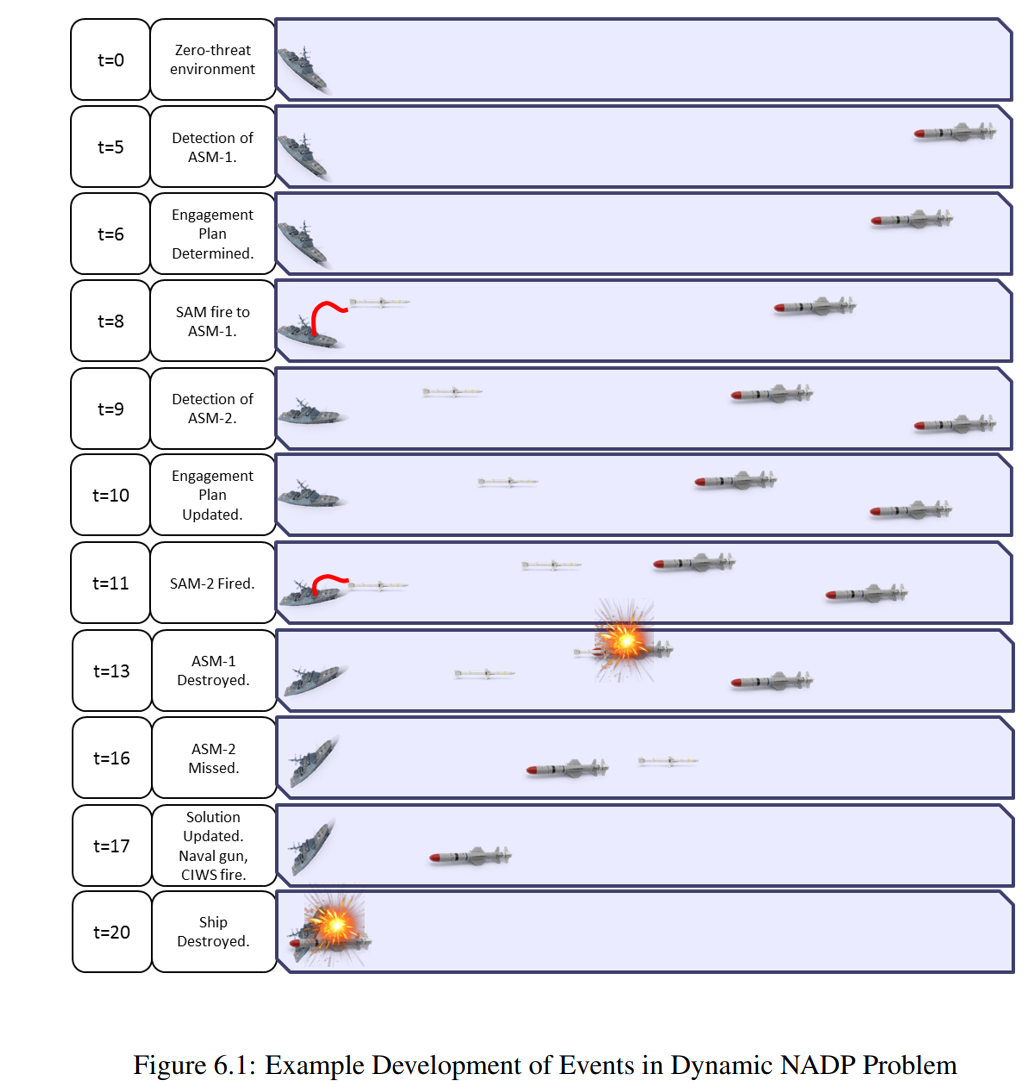
海洋环境中的防空是保护友军海军资产免受空中威胁。为了最大限度地减少对被防御资产的威胁,需要将稀缺的防御资源优化分配给目标。灵活的指挥和控制功能是处理防空事件动态性质的必要条件。须确保单舰或特遣舰队防空环境中传感器和武器之间的协调和自动化。为了在决策自动化方面提供有效的决策支持,舰艇指挥控制系统需要采用快速高效的算法。
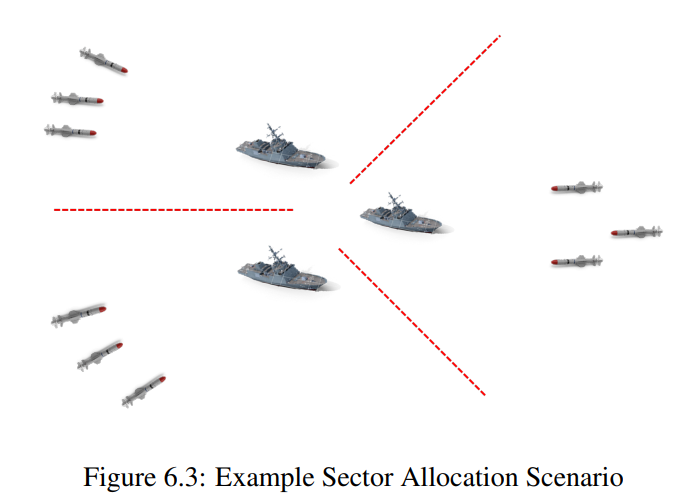
舰艇防空规划(NADP)问题包括舰艇的机动决策以及针对威胁分配/调度武器和传感器,从而使友军部队的总预期生存概率最大化。NADP 问题可定义为武器目标分配(WTA)问题的一个特定版本,自 20 世纪 50 年代以来,已有文献对该问题进行了广泛研究。与其他研究相比,NADP 问题包含了新的特征,使问题的定义更加现实和适用。它还涉及传感器分配要求、武器/传感器盲区、取决于序列的设置时间和舰船雷达信号。
本文的目标是开发精确/启发式求解方法,为 NADP 决策自动化提供快速高效的决策支持。论文提出了 NADP 问题的混合整数非线性规划 (MINLP) 模型,并针对静态和动态问题开发了启发式求解方法。计算结果证明,这些启发式方法在解决 NADP 问题时既快速又高效。
成为VIP会员查看完整内容
相关内容

Arxiv
0+阅读 · 2024年11月19日
Arxiv
224+阅读 · 2023年4月7日


相关VIP内容
相关资讯
相关论文
Arxiv
0+阅读 · 2024年11月19日
Arxiv
224+阅读 · 2023年4月7日