
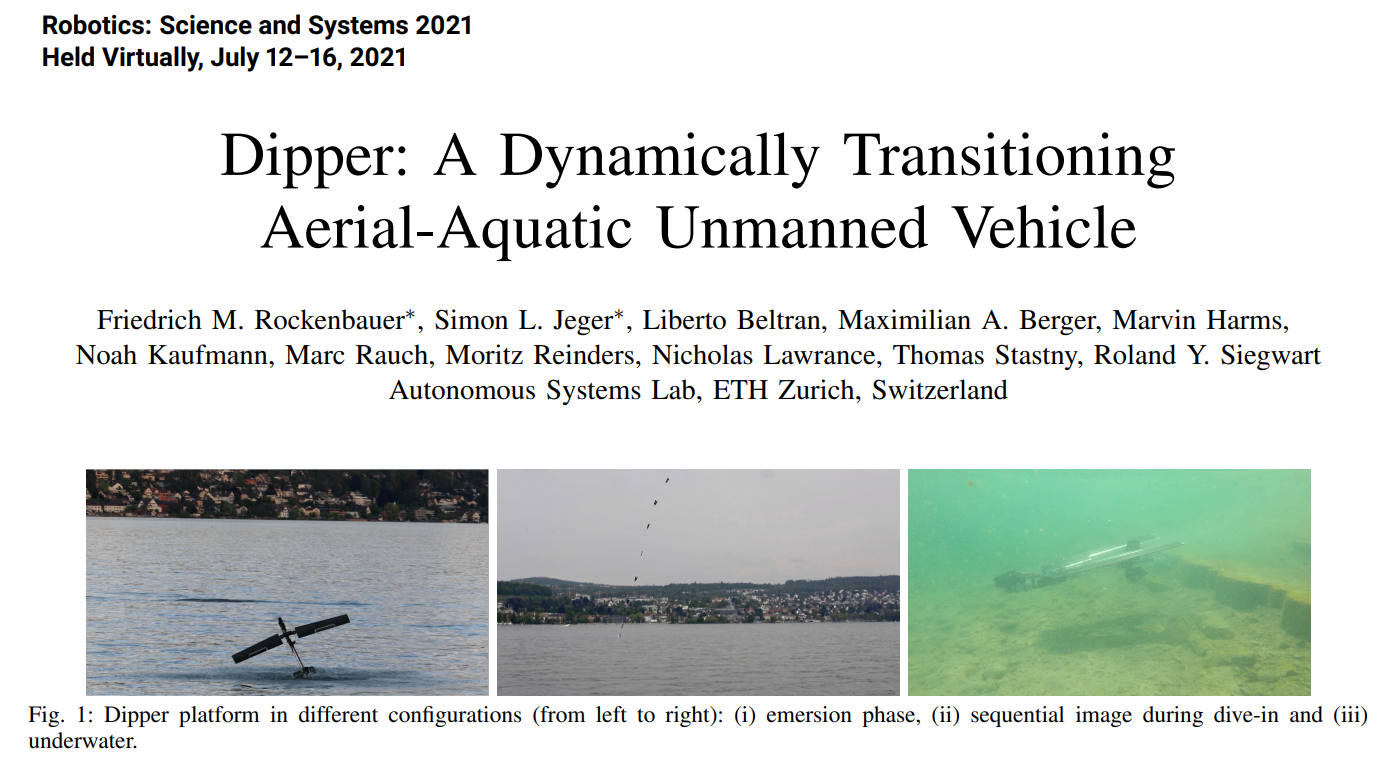
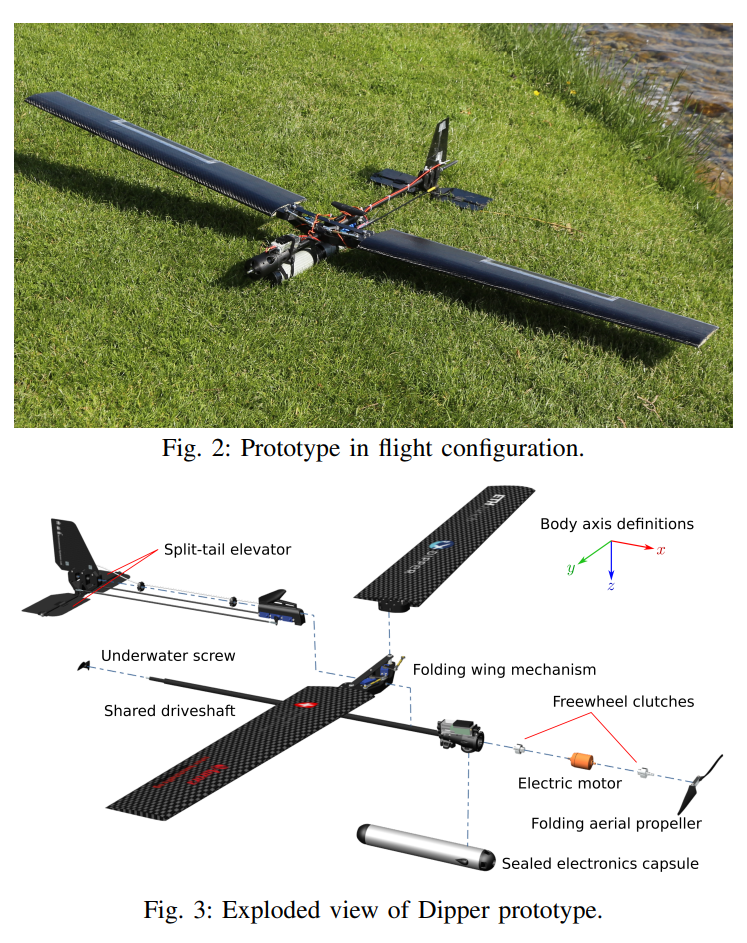
许多现代机器人系统的运动针对单个目标域(空中、水面或水下)进行了优化。在这项工作中,我们解决了开发能够在空中和水下控制运动的机器人系统挑战。此外,我们探讨了空气和水之间动态转换的特殊挑战。我们提出了 Dipper,一种水上混合动力航行器。 Dipper 是一种轻型固定翼无人机 (UAV),具有主动后掠翼。仿生系统不仅能够在飞行和水下进行高效机动,还可以进行动态的空中-水上过渡。我们描述了 Dipper 原型的设计、构造和测试,并展示了可重复性和稳健性,尤其是在过渡阶段。
成为VIP会员查看完整内容
相关内容
Arxiv
0+阅读 · 2023年2月24日


相关VIP内容
相关资讯
相关论文
Arxiv
0+阅读 · 2023年2月24日