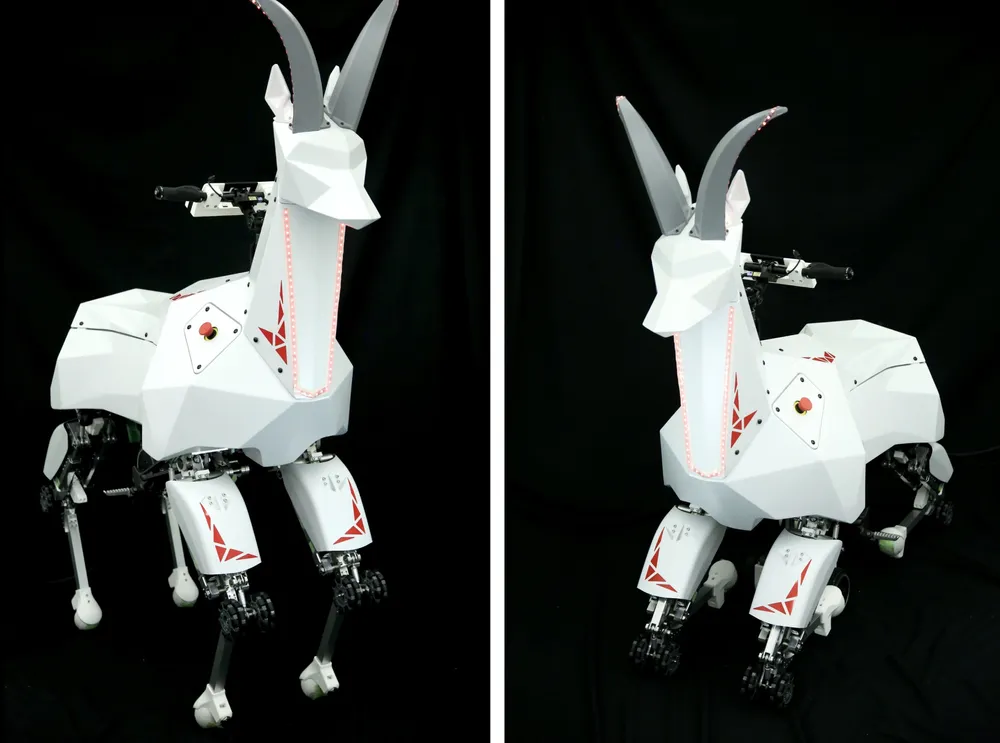
今天的主角是一个外观灵感来源于野山羊的机器人,由日本川崎机器人公司研发。
![]()
自 2015 年以来,川崎机器人公司一直致力于开发名为 Kaleido 的「稳健的人形平台 (RHP)」。这次他们另辟蹊径,从双足机器人转变为研发四足仿生机器人。RHP 开发的负责人 Masayuki Soube 最近接受了媒体关于 Bex 计划的采访。
Masayuki Soube 表示:「Kaleido 让我们意识到开发双足机器人的困难。类人机器人与人类具有相同的体态,因此它们用途广泛,具有完成人类能做的所有事情的潜力,但要投入实际使用还需要很长时间。另一方面,我们也在研发借助轮子灵活移动的轮式机器人,但相比之下腿比轮子更适合在崎岖的地形上移动。
因此,川崎试图在人形机器人和轮式机器人之间寻找一种可能,这也是我们开发四足步行机器人 Bex 的原因。我们相信,在类人机器人研发过程中构建起来的行走技术,绝对可以应用到四足机器人上。」
![]()
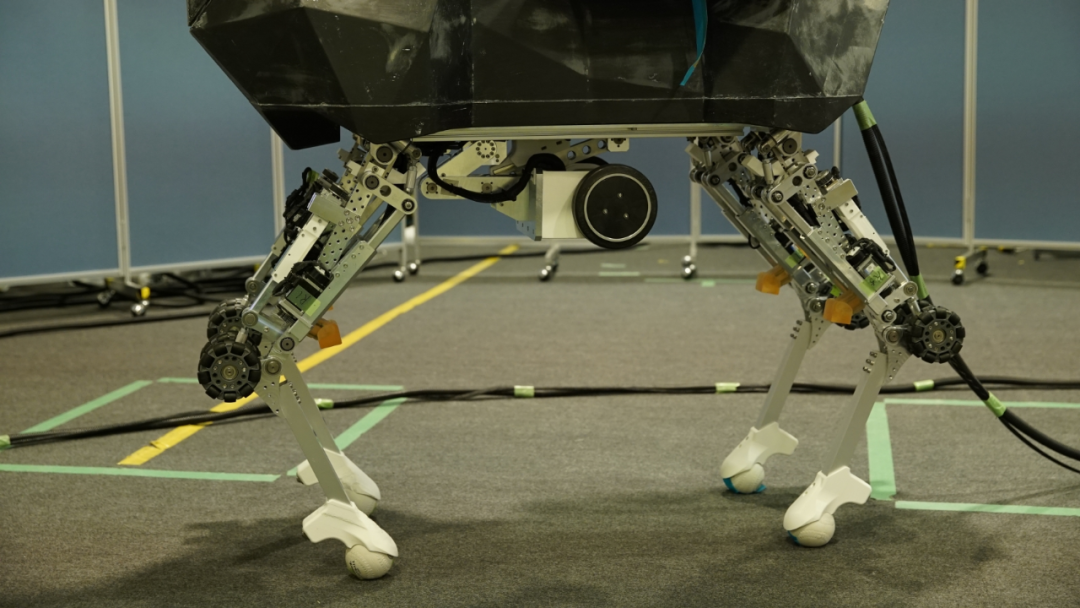
这也正是 Bex 最关键的一处设计 —— 混合移动系统。如果脚底装轮子在崎岖道路上走不稳,那就装在膝盖上吧。
![]()
Bex 的膝盖处安装了四只轮子,在光滑的水平面上 Bex 屈膝(呈跪状)就能借助这些轮子快速移动:
![]()
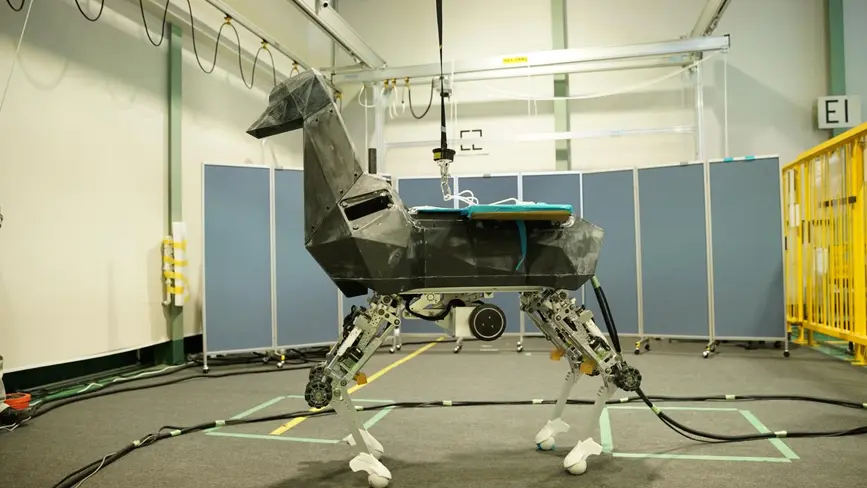
值得注意的是,Bex 有一个座椅和车把,最多可以承载 100 公斤。这听起来可以载一个人移动了,但 Masayuki Soube 表示:川崎并没有将 Bex 用于人力运输,而是选择了更实际的应用。
一方面,Bex 可以运载轻型货物,例如在建筑工地运输材料、在农场运输农作物;另一个方面 Bex 可以用于检查,例如在一个巨大的工厂中,Bex 可以环顾四周,通过其自身配备的相机来远程检查仪器的操作。
此外,Bex 的上半身不是一成不变的,研发团队计划根据应用场景对其进行调整,而川崎将重点关注其下半身的混合移动系统,并将其打造成一个开放应用的工具。
![]()
参考链接:https://spectrum.ieee.org/kawasaki-robotics-bex
![]()
© THE END
转载请联系本公众号获得授权
投稿或寻求报道:content@jiqizhixin.com