多目标跟踪(MTT)在自主系统的制导、导航和控制中发挥着至关重要的作用。然而,它在计算复杂性、测量-跟踪关联模糊性、杂波和漏检等方面提出了挑战。
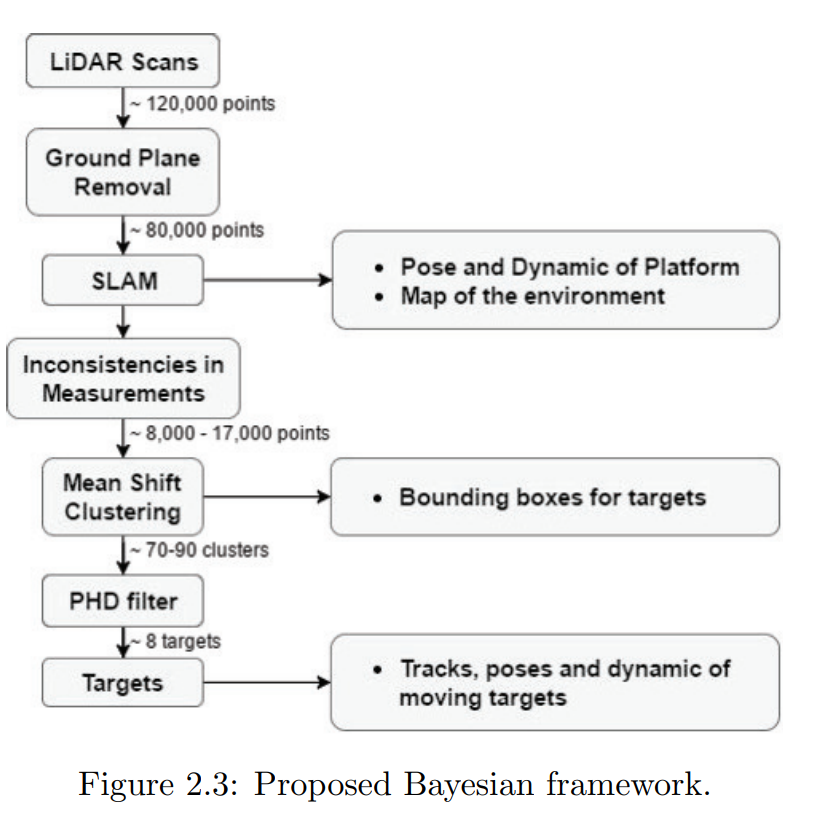
论文的前半部分探讨了在移动平台上使用摄像头和光探测与测距(LiDAR)扫描仪进行多扩展目标跟踪的问题。首先设计了一个贝叶斯框架,用于同时定位和映射以及检测动态目标。开发了两个随机有限集滤波器来跟踪提取的动态目标。首先,占格(OG)高斯混杂(GM)概率假设密度(PHD)滤波器联合跟踪目标运动状态和目标形状的改进占格图表示。与传统的 GM-PHD 过滤器相比,OG-GM-PHD 过滤器成功地重建了目标的形状,并产生了较低的最优子模式分配(OSPA)误差指标。第二种 MTT 过滤器(分类多重模型 (CMM) 标签多重伯努利 (LMB))是为了利用与类别相关的运动特征而开发的。它融合了从图像到点云的分类数据,并将物体类别概率纳入跟踪的目标状态。这样就能更好地实现测量与跟踪之间的关联,并利用与类别相关的运动和出生模型。CMM-LMB 过滤器在 KITTI 数据集和 CARLA 模拟器的模拟数据上进行了评估。在这两种情况下,CMM-LMB 过滤器的 OSPA 误差指标都低于多重模型 LMB 和 LMB 过滤器。
下半部分研究了使用窄视场和有限行动回转率传感器的 MTT 传感器管理。空间态势感知(SSA)的传感器管理被选为一个应用场景。用于空间态势感知(SSA)的经典传感器管理算法往往只考虑直接回报。本论文开发了深度强化学习(DRL)智能体,以克服长期传感器任务分配问题中问题规模的组合性增加。为了训练和评估 DRL 智能体,开发了一个用于 SSA 传感器任务分配的定制环境。DRL智能体采用基于群体训练的近端策略优化方法进行训练,其表现优于传统的近视策略。