
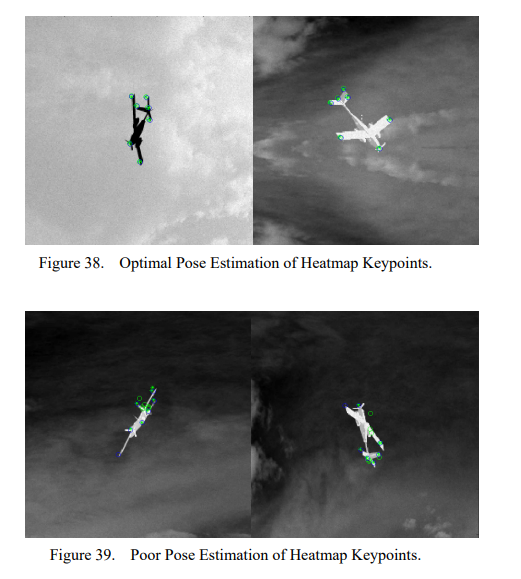
目标姿态估计和目标点选择在直接能量武器系统中至关重要,因为它使系统能够指向目标的特定和战略区域。然而,这是一项具有挑战性的任务,因为需要一个专门的姿态传感器。在新出现的深度学习能力的激励下,本工作提出了一个深度学习模型,以欧拉角的方式估计目标航天器的姿态。深度学习模型的数据是通过实验从三维无人机模型中产生的,其中包括大气背景和湍流等效应。目标姿态来自于二维关键点的训练、验证和预测。有了关键点检测模型,就有可能检测到图像中的兴趣点,这使我们能够估计有关目标的姿势、角度和尺寸。利用弱透视直接线性变换算法,可以从三维到二维的对应关系中确定三维物体相对于摄像机的姿势。此外,从这种对应关系中,可以确定目标上的瞄准点,模仿激光跟踪。这项工作评估了这些方法及其在模拟真实世界环境中实验产生的数据的准确性。
成为VIP会员查看完整内容
相关内容

Arxiv
0+阅读 · 2022年11月8日


相关VIP内容
相关资讯
相关论文
Arxiv
0+阅读 · 2022年11月8日