
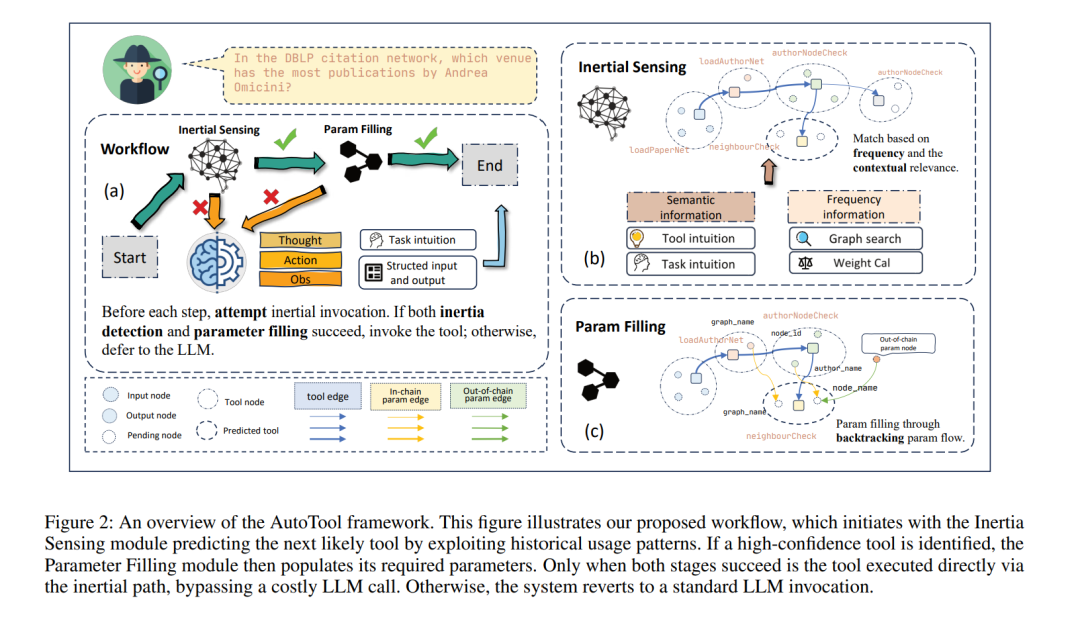
大型语言模型(LLM)智能体凭借其推理与决策能力,已成为自动化复杂任务的强大工具。然而,当前智能体框架的主要瓶颈在于工具选择的高推理成本,尤其是在诸如 ReAct 等方法中,需在每一步反复调用 LLM 来决定使用哪一项工具。为此,本文提出 AutoTool,一种新颖的基于图的框架,通过利用一个关键的经验性观察来绕开重复的 LLM 推理:工具使用惯性(tool usage inertia)——即工具调用往往遵循可预测的序列模式。 AutoTool 从历史智能体轨迹构建有向图,其中节点表示工具,边则刻画工具之间的转移概率,从而有效建模工具选择的这种“惯性”特性。同时,它进一步整合参数层面的信息来优化工具输入的生成。通过遍历这一结构化表示,AutoTool 能够以极少依赖 LLM 推理的方式,高效完成工具及其参数的选择。 在多类智能体任务上的大量实验表明,AutoTool 在保持竞争性任务完成率的同时,将推理成本降低了最高 30%,为推理负载沉重的框架提供了实用且可扩展的增强方案。我们的研究凸显了在 LLM 智能体设计中引入统计结构的潜力,使其在不牺牲性能的前提下进一步提升效率。 代码地址:https://github.com/jiajingyyyyyy/AutoTool
成为VIP会员查看完整内容
相关内容
Arxiv
42+阅读 · 2023年4月19日
Arxiv
222+阅读 · 2023年4月7日
Arxiv
86+阅读 · 2023年4月4日
Arxiv
151+阅读 · 2023年3月29日


相关VIP内容
相关资讯
相关论文
Arxiv
42+阅读 · 2023年4月19日
Arxiv
222+阅读 · 2023年4月7日
Arxiv
86+阅读 · 2023年4月4日
Arxiv
151+阅读 · 2023年3月29日