

生产型作战模型和模拟不具备对指挥结构中的多个单位进行自动规划的能力,也缺乏对火力压制等效果进行前瞻性推理的工具。这些差距限制了建模战斗计划的速度,使其无法满足人类细致输入的要求。本文了提出了一个自动化作战规划系统的架构框架,主张采用职责分离的方法--例如在机动和火力之间--来设计和管理复杂的规划系统。然后,描述了自动火力支援计划组件的概念模型,该组件在连续时间计划空间中使用贪婪的最佳优先搜索,在多项式时间内降低给定机动计划的风险。介绍了该组件在符合规划框架的架构中的实现。然后,介绍了一种定量和定性的方法来验证和确认计划模型,并将其应用于火力支援计划的实施。结果表明,在合理的运行时间后,自动火力支援计划能有效改善模拟战斗结果,并具有一些现实的突发特性。除了新颖的规划算法外,本研究还提供了设计原则、评估技术和有前景的结果,以指导战斗模型行为自动化的改进。
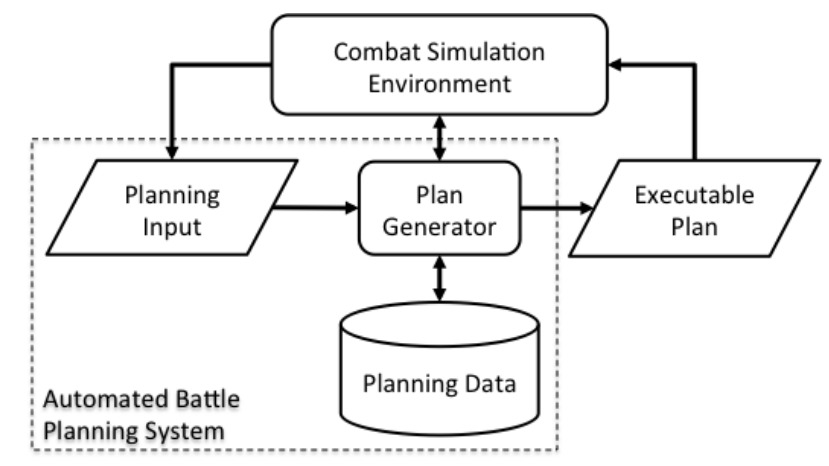
图 1. 概念规划框架
当今的战斗模拟软件无法自动生成逼真的作战计划。取而代之的是人工场景设计和操作。对于基于建模与仿真(M&S)的分析而言,完成一项研究所需的大部分时间都花在了作战计划的制定上。这就限制了研究的场景数量,只能是少数几个。对于基于 M&S 的训练而言,缺乏自动规划能力会增加对人类操作员的要求,从而限制了用户从基于计算机的实战训练替代方案中寻求的效率收益。在军事和视频游戏研究中出现了一些自动化机动规划的例子,但迄今为止,它们还没有在生产型军事模拟中得到应用。目前还没有实际的自动火力支援规划能力得到展示。
本文提出了自动化作战计划系统(ABPSs)的架构框架(图 1),主张采用职责分离的方法(例如,在机动和火力之间)来设计和管理复杂的计划系统。该框架的主要组成部分包括
-
规划数据:任务、方法(实现任务的规则)以及赋予规划特征的衍生模型
-
计划输入:从作战模拟环境和用户获取的数据,用于为 ABPS 制定计划问题
-
计划生成器:实际生成作战计划的算法、启发式方法、数据结构和接口
该框架以一种自然的方式划分了参与自动化作战计划的三类人员的职责:情景设计人员,负责为特定的 M&S 问题配置计划输入;行为开发人员,负责编写和更新计划数据,以模拟不同的战术;以及自动化计划开发人员,负责计划生成器的内部工作。该框架还引入了规划风格,将各单元限制在任务、方法和派生模型的适当子集内,以控制可从规划数据存储中获得的选项,而随着时间的推移,规划数据存储可能会变得相当庞大。
计划生成器包括一个计划控制器,它调用多个任务规划器和增强规划器子组件来生成部分计划。任务规划器试图生成部分计划,从质量上实现规划输入中提供的要求任务,并在可能的情况下选择成本较低的方案。改进规划员根据一个或多个目标函数扩展或修改局部计划,从数量上对其进行改进。任务规划员和改进规划员分别以解决问题和优化的方式进行作战规划。每个任务规划员或增强规划员都专注于规划的一个特定方面,如机动、火力或维持。计划生成器最终会将其内部计划表示编译成可在目标战斗模拟环境中执行的格式。
在学术文献和工业界出现了一些机动计划器的实例--例如,William van der Sterren 为虚拟战斗空间(VBS)设计的计划攻击系统。这类工具可用作 ABPS 的任务规划器。
现代军事战术依靠火力压制敌人的威胁。虽然目前使用的一些作战模型包括压制效果,但还没有自动规划工具可将火力支援任务添加到机动计划中。提出了一个火力支援计划器的概念模型,它可以作为 ABPS 的增强计划器。火力支援计划器使用风险区间(图 2)作为主要数据元素。每个风险区间对应友军部队暴露在敌军部队潜在火力下的一段连续时间。每个风险区间的数字代价是友军部队在穿越相应路径时可能遭受的预期伤亡人数。这一数值可通过对威胁的杀伤率进行时间积分来计算。火力支援任务是一项指令,要求一个单位移动到特定地点,在一段时间内压制单个威胁单位,暂时降低威胁的杀伤率。每项火力支援任务一旦添加到计划中,就会降低与其时间间隔重叠的所有风险间隔的数值成本。
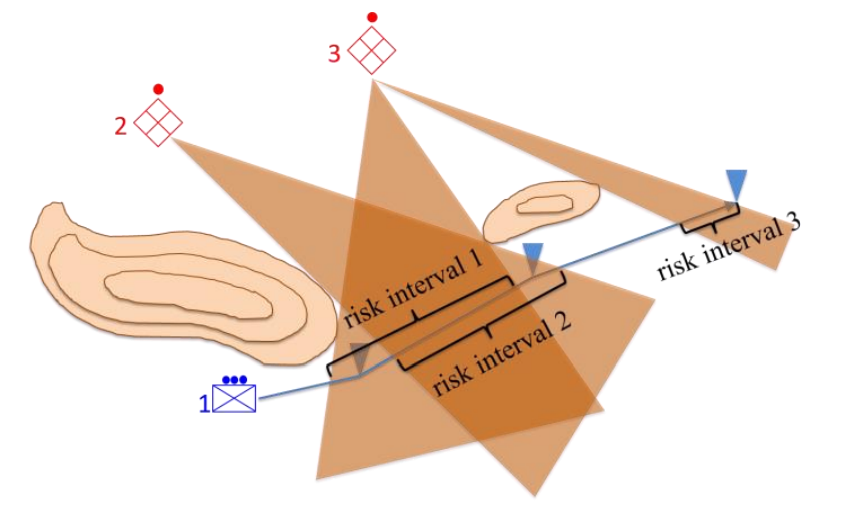
图 2. 风险区间
火力支援计划的计划成本被定义为该计划所有风险区间成本的总和,而候选火力支援任务的得分则是如果该任务成为下一个新增任务,其对该计划成本的潜在减少量。根据这一方案提出了一种贪婪的最佳优先算法来构建火力支援计划。在构建火力支援任务选项时,尝试将每种火力支援资产应用到每个风险区间,并使用多点战术寻路来确定位置、路线和时机。通过使用计划空间表示法,能够在计划的最关键时刻实施压制;并不局限于按时间顺序向前或向后规划。
为了实现火力支援计划,首先在 Unity 3D 开发平台上建立了一个相对简单的战斗模型,称为 Wombat XXI。它包括一个从真实世界数据导入的多边形地形高程模型、分层组织的单位、实体移动编队、取决于射程的命中概率,以及一个类似于 COMBATXXI(一种生产型分析战斗模拟系统)的压制模型。根据上述概念规划框架构建了 ABPS 原型。它的单一任务规划器以分层任务网络表示法为指定单位构建机动计划,大量使用用户输入。其 “增强计划器 ”使用火力支援计划器算法,在计划中添加移动和压制任务,消耗有能力单位的未执行任务时间间隔,以降低敌方火力风险。手动 "机动计划器有助于为火力支援计划器构建特定的测试场景。
采用定量和定性的方法来验证和确认火力支援计划的实施。图 3 所示的流程本身可用于今后类似性质的开发工作。定量测试可为定性测试中的观察结果提供更有力的证据;定性测试可检查定量测量结果是否有现实可信的解释。
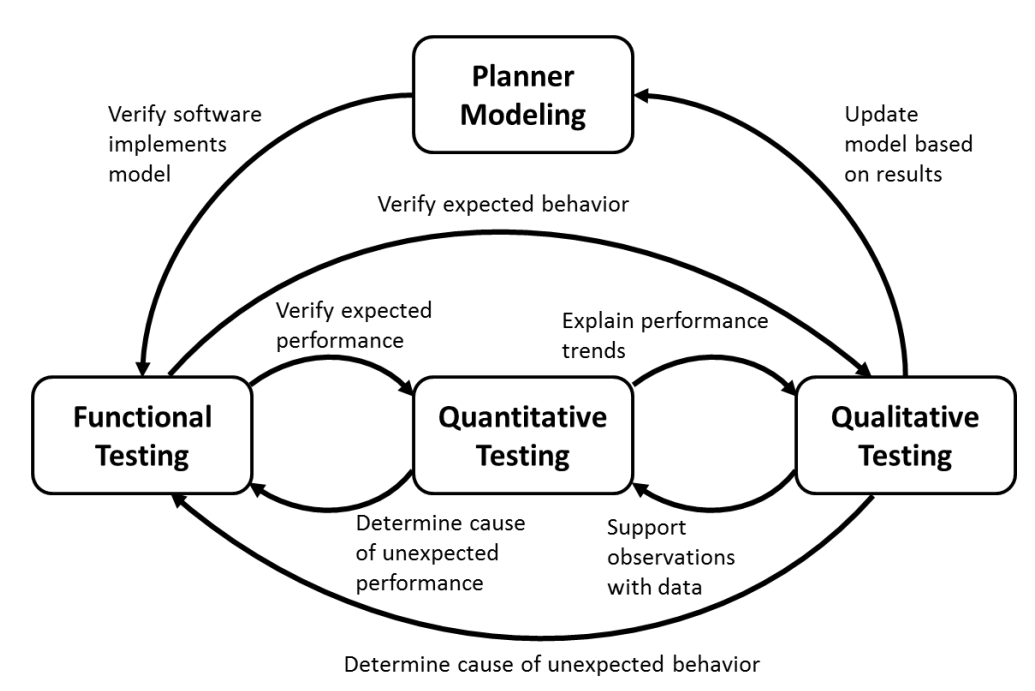
图 3. 验证和确认流程
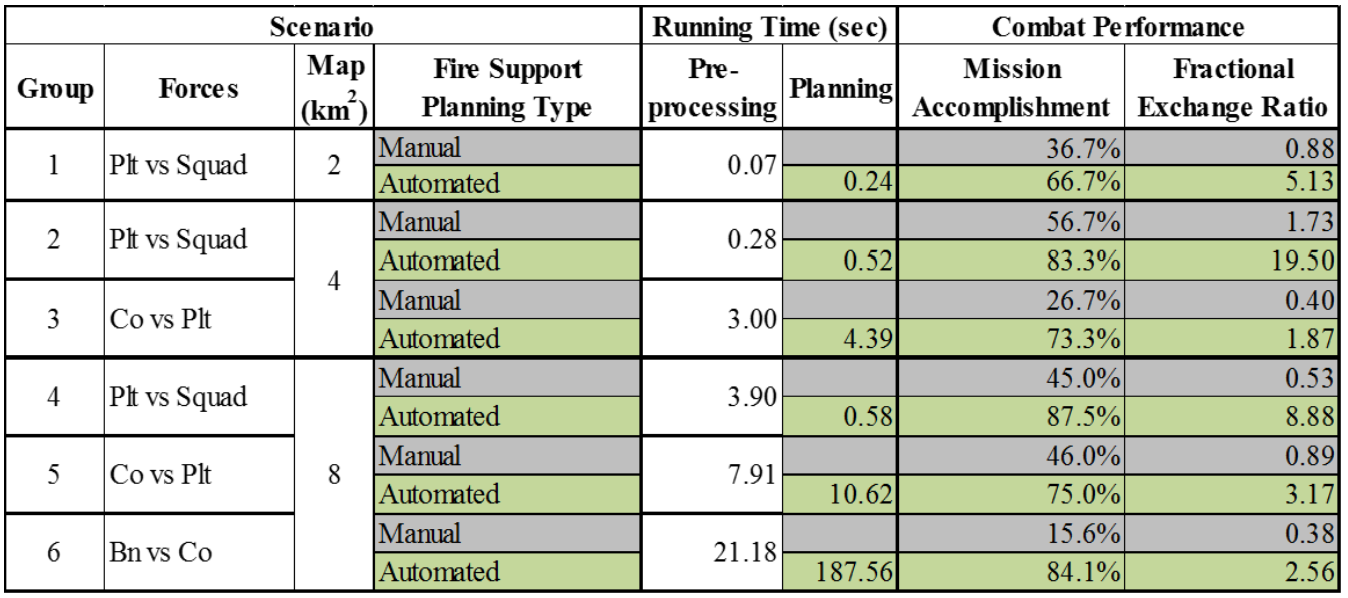
定量结果(表 1)表明,自动火力支援计划比人类设计的简单计划能产生更好的模拟作战结果,尽管如果时间不受限制,人类最终也能找到更好的计划。实际运行时间从排级场景的不到一秒到营级场景的几分钟不等。如果在单独的线程中运行,该算法的可扩展性足以满足排级和连级规模的在线实时应用,而对于离线规划,它的速度明显快于人工输入。定性分析揭示了自动计划中一些有趣的突发特性,潜在用户须考虑对其进行验证。还发现了当前版本中的一些不足之处,实施时需要处理或接受这些不足之处。
表 1. 定量测试结果
除了新颖有效的火力支援规划算法和功能实现外,这项研究还提供了设计原则、评估技术和有希望的结果,以指导改进作战模型的自动作战规划。将这一能力引入生产系统的条件已经成熟。虽然这需要前期投资和持续的维护与管理,但已有足够的成熟技术来提高场景设计的效率。通过允许人工仔细审查自动化计划,可以在完善自动化的同时建立建模界的信任。一旦达到足够的舒适度和理解程度,在线重新规划可能会彻底改变战斗模型在各种不同应用中的使用方式。

