
具身智能强调智能受脑、身体与环境协同影响,更侧重关注智能体与环境的“交互”. 因此, 在具身智能的研究中, 智能体的物理形态与感知、学习、控制的关系起到至关重要的作用. 当前, 具身智能综合吸收了机构学领域关于形态、结构, 机器学习领域关于感知、学习, 以及机器人领域关于行为、控制等的相关研究成果, 形成了相对完整、独立并仍在蓬勃发展 的学科分支. 但是, 目前尚无文献完整地梳理基于形态的具身智能研究进展. 本文从这个角度出发, 重点围绕基于形态计算 的行为生成、基于学习的形态控制, 以及基于学习的形态优化这三方面总结重要的研究进展, 凝炼相关的科学问题, 并总结 未来的发展方向, 可为具身智能的研究提供参考.
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c220564
0 引言
现代人工智能起源于上世纪五十年代的达特茅斯会议. 在此之后的一段时期内, 对人工智能的研究主要限于符号处理范式(也被称为符号主义). 然而, 符号主义的局限性很快在实际应用中暴露出来, 并催动了联接主义的发展, 形成了包括多层感知机、前向神经网络、循环神经网络, 直至今日风靡学术界与产业界的深度神经网络等多种方法. 这种用人工神经网络模拟认知过程的方法在适应、泛化与学习方面的确取得了很大的进展, 但并未真正解决智能体与真实物理世界交互的难题, 在可解释性、鲁棒性等方面也面临很大的挑战[1]. 事实上, 关于符号主义与联结主义所存在的问题的讨论在上世纪七、八十年代就引起了极大的关注. 汉斯·莫拉维克(Hans Moravec)、罗德尼·布鲁克斯(Rodney Brooks)与马文·明斯基(Marvin Minsky)等提出的“莫拉维克悖论” (一般通俗地表述为: 要让电脑如成人般地下棋是相对容易的, 但是要让电脑有如一岁小孩般的感知和行动能力却是相当困难甚至是不可能的)就体现了很多学者的担忧. 针对这一问题, 明斯基从行为学习的角度提出了“强化学习”的概念. 布鲁克斯从控制论角度出发, 强调智能是具身化(Embodied)和情境化(Contextlized)的[2]. 换言之, 智能体必须拥有“身体”才能由虚拟世界进入到真实世界, 并通过与真实世界的交互来发育或进化出智能. 他在“智能需要一个身体”[3]这一思想指导下开发了一系列仿生机器人, 并指出即使研究行走移动等简单的行为, 也可以促进理解智能的具身本质. Rolf Pfeifer在其著作How the Body Shapes the Way We Think[4]中通过分析“身体是如何影响智能的”对“智能的具身化”做了清晰的描述, 阐明了“具身性”对理解智能本质与研究人工智能系统的深远影响. 这些工作为人工智能的第三个流派——以具身智能为代表的行为主义方法奠定了坚实的技术基础.
与符号主义强调“表示”、联接主义强调“计算”不同, 具身智能更侧重关注“交互”, 即智能受脑、身体与环境协同影响, 并由身体与环境相互作用中, 通过信息感知与物理操作过程连续、动态地产生. 关于具身智能的研究可以上溯到古希腊时期亚里士多德(Aristotle)关于身体具有感知−运动层面的主体性的论述. 进一步, 包括查尔斯·达尔文(Charles Robert Darwin)、梅洛·庞蒂(Maurice Merleau-Ponty)、克劳德·贝纳德(Claude Bernard)和马丁·海德格尔(Martin Heidegger)等在内的科学家分别从生物学、哲学、生理学等多个角度诠释了身体对智能的影响作用. 进入二十世纪六十年代, 瑞士心理学家让·皮亚杰(Jean Piaget)在研究儿童心理学过程中明确地指出动作是认知的源泉和知识的基础, 适当的动作行为可以帮助婴儿逐步形成关于世界的认知. 美国视觉心理学家詹姆斯·吉布森(James Gibson)在其关于人类视觉与机器视觉的研究中也强调了人与环境交互过程中具身感知与行为动作的密切联系. 由于其内在的哲学、心理学、生理学及认知科学基础, 具身智能的相关研究成果分布于仿生/发育/进化机器人学、人工生命、普适计算等多个学科和方向中[5-7]. Nature Machine Intelligence创刊号也刊发了具身智能的专题论文; 文献[8-9]全面阐述了具身智能与机器人的关系; 麻省理工学院还成立了名为 “具身智能” 的研究团队(https://ei.csail.mit.edu); 包括Google、Meta等在内的国际知名公司也在大力投入力量开展具身智能的相关研究. 当前, 具身智能的研究已广泛拓展到教育[10]、材料[11-12]、能源[13]等 领域, 成为未来新一代人工智能理论与应用突破的一个重要窗口.
为与具身智能区分, 本文将强调“表示”、“计算”的方法归入“离身智能” (Disembodied intelligence)的范畴. 具身智能与离身智能这两类研究范式尽管出发点不同, 且在历史上曾多次交锋, 但不得不承认这样的交锋有力地推进了人们对于智能的理解和模拟. 文献[14]讨论了模拟计算的具身认知特性, 并以模拟计算机为例阐释了具身认知与基于计算与表示的智能的关系. 总体而言, 在大数据、GPU等资源的驱动下, 离身智能在以互联网信息处理为代表的领域已经取得了极大成功; 而具身智能涉及机构、材料等领域, 已成为智能机器人的核心基础. 事实上, 现在大家普遍接受的观点是具身智能与离身智能并不相互排斥, 特别是在方法层面上, 包括深度学习、强化学习等方法都已成为解决离身智能和具身智能问题的重要工具. 在对智能的探索过程中, 具身智能与离身智能应该相互补充、协作发展, 共同促进对智能的理解、模拟与扩展. 当前, 具身智能综合吸收了机构学领域关于形态、结构, 机器学习领域关于感知、学习, 以及机器人领域关于行为、控制等相关的研究成果, 形成了相对完整、独立并仍在快速发展的学科分支, 并在受人启发的感知、决策、控制与系统设计等方面取得了长足的进展[15]. 尽管当前也有一些以“具身智能综述”为主题的论著出现[16-17], 其内容主要局限于感知与行为的联合学习, 忽略了物理形态的影响. 在具身智能中, 智能体的物理形态与感知、学习、控制的关系起到至关重要的作用, 但目前尚无文献完整地梳理以具身智能中形态方面的研究进展. 本文针对这一问题综合分析总结相关的重要研究进展, 以期为这一领域的发展提供参考. 与具身智能相关的哲学探讨, 心理学、生理学以及材料学等方面的研究进展, 不在本文讨论范围之列.
本文结构安排如下: 第1节概括了具身智能的体系结构, 明晰了基于形态的具身智能研究在整个具身智能研究体系中的位置, 并总体介绍相关领域的发展趋势; 第2、3、4节分别针对基于形态计算的行为生成、基于学习的形态的控制, 以及基于学习的形态优化这三方面重要问题展开详细评述; 第5节具体针对软体机器人这种典型的形态介绍相关前沿进展; 第6节是总结与展望.
1. 基于形态的具身智能的体系结构
具身智能的一个核心要素即是智能体自身形态的设计、控制与优化问题. 这方面的研究工作与机构学、机器学习等领域关系紧密, 交叉性强, 鲜有系统性的综述文献. 本节通过分析具身智能的特点, 按照形态、行为与学习这三个模块梳理了这一领域的研究进展与关键科学问题. 这三个模块之间存在紧密的联系(见图1). 这种联系就表现为具身智能的不同内容. 值得一提的是, 本文重点聚焦的内容综合考虑形态与行为、学习之间的关系. 这与文献[9, 18]中提及的“物理智能” (Physical intelligence)有重要区别. 后者重点强调的是依靠本体自身的结构特点所形成的功能.
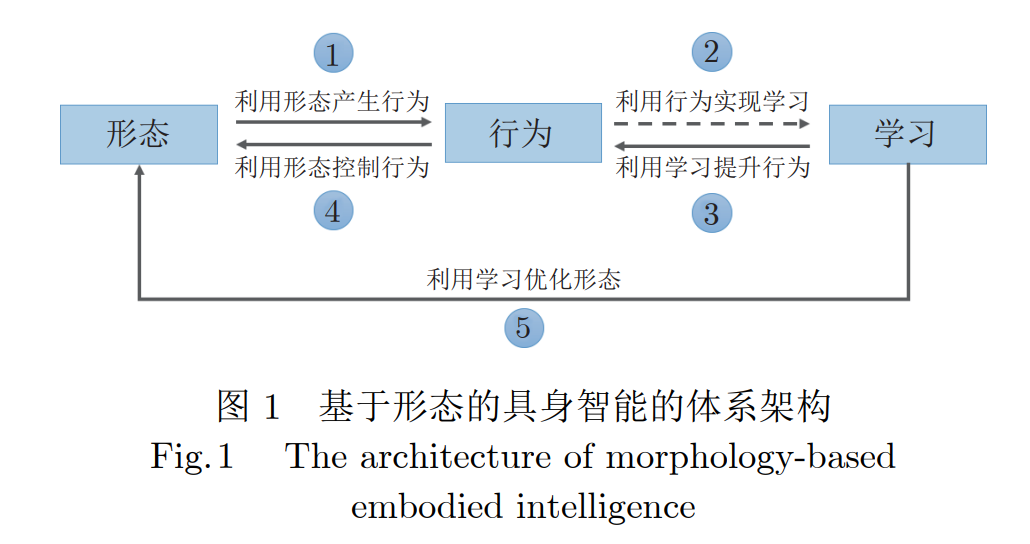
按照图1所示的体系架构, 在基于形态的具身智能中, 形态、行为与学习之间的关系可以归结为以下几个方面: 1)利用形态产生行为: 重点强调利用具身智能体的形态特性巧妙地实现特定的行为, 从而达到部分取代“计算”的目的. 这部分的相关研究进展将在本文第2节“基于形态计算的行为生成”中展开. 2)利用行为实现学习: 重点强调利用具身智能体的探索、操作等行为能力主动获取学习样本、标注信息, 从而达到自主学习的目的. 这部分工作比较前沿, 相关成果尚未形成比较完整的体系, 却是未来重要的研究方向, 因此本文将其安排在结论与展望部分评述. 3)和4)分别强调利用学习提升行为, 以及利用行为控制形态. 后者有多种实现方法, 但当前利用学习手段来提升行为, 并进而控制形态的工作是现代人工智能技术发展起来后涌现出来的新型智能控制方法. 特别是基于强化学习的技术已成为当前的热点手段. 因此本文第3节“基于学习的形态控制”重点从这一角度具体展开评述. 5)利用学习优化形态: 强调利用先进的学习优化技术实现对具身智能体的形态优化设计. 这部分的相关研究进展将在本文第4节“基于学习的形态优化”中展开.
2. 基于形态计算的行为生成
生物的身体在与环境适应过程中逐渐形成自己特定的形态结构. 这种形态结构对于生物的生存起着至关重要的作用. 文献[19]通过研究失去生命的鱼, 揭示了鱼的身体形态仅靠与环境的交互就可以在水中产生自然的运动. 这种现象在人类生活中也比比皆是, 例如人在拿取一个物体的时候, 并不需要对物体的材质、形状、大小、姿态等进行精确估计就能很容易地实现. 这种单靠结构形态实现的智能行为很早就得到了关注, 并在不同的场合被称为“形态计算”或“形态智能”. 本文将统一采用“形态计算”来描述利用身体的形状、材质以及动态特性等改进计算效率, 并进一步实现对身体行为控制的机制. 通过形态计算, 可以将部分需要用“脑”完成的计算工作移交给“身体”完成, 从而利用“身体”与环境交互的作用来产生行为. 形态计算对于仿真−物理迁移, 实现低功耗绿色计算都具有很大的优势[20], 甚至被视为具身智能中最为核心和重要的内容[21]. 近年来, 随着精密机构、软体材料等领域的发展, 形态计算迎来了新的发展机遇, 包括Artificial Life、Advanced Robotics、IEEE RAM等相继举办了形态计算相关的专辑, 有力地推动了这一领域的发展[22-23].
由于形态计算与仿生机器人的研究关系非常密切, 二者之间的关系甚至会引起一些混淆. 事实上, 形态计算更关心的是利用形态来产生行为, 而并非从形态上逼真地模仿某些生物. 很多仿生型机器人通过模仿生物的形态以获得一些功能上的突破, 例如腿式机器人相比轮式能获得爬楼的能力. 但在行为控制方面, 并没有充分利用形态自身的优势, 仍需要设计复杂的控制器. 这些情形都不属于本文讨论的形态计算之列. 此外, 本文所讨论的形态计算与文献[24]中使用的“具身计算”的概念也不相同. 后者更强调在人身体中的可穿戴、可吸收、可植入、可嵌入的显式计算设备, 因而也可称为“以身体为中心的计算”, 而“形态计算”更强调利用结构自身的特点实现的隐式计算.
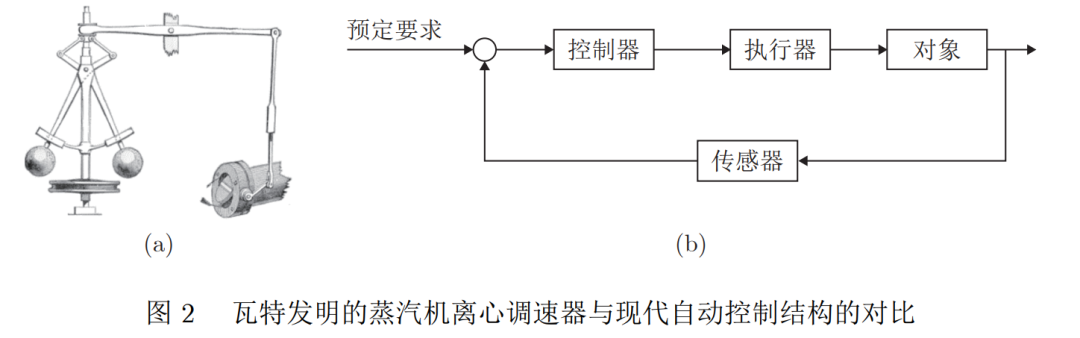
利用形态计算实现自动控制的历史可以追溯到瓦特发明的蒸汽机离心调速器, 这也是历史上公认的第一台面向实际工业应用的控制器(见图2). 离心调速器的发明使得蒸汽机走向了大规模应用, 并助力了第一次工业革命. 瓦特甚至被称为“蒸汽机之父”. 从行为控制的观点看, 离心调速器实际上是利用机构系统实现了反馈控制的模拟运算, 但这种控制结构与现代控制系统的“控制器−传感器”的反馈控制结构却有很大差别. 通过分析离心调速器的结构, 可以发现其形态中蕴含着丰富的计算与表示, 其核心与传统人工智能领域并不矛盾, 只不过是利用形态来实现计算与表示. 然而, 随着数字计算设备的迅速发展, 计算机逐渐用于实现复杂的控制器运算, 使得这种利用机构形态实现行为控制的方法在自动控制领域被极大地忽视.
尽管如此, 机器人领域的研究者并未完全放弃对这一问题的探索. 近三十余年来, 涌现出了大量包括被动行走机器人等在内的形态计算装置, 以及相关的理论模型. 本节即重点从形态计算装置与理论模型这两个角度梳理相关的重要进展, 并将在第5节具体针对软体机器人介绍相关的形态计算方法.
**2.1 形态计算装置的发展
利用形态计算实现复杂行为控制的典型例子当属上世纪九十年代的被动行走机器人(Passive walking robot). 文献[25]利用这种机构的运动特性分析人类的行走机理, 阐释了利用无源动力学实现这种机构的基本原理, 并证明它可以无动力地在轻微的斜坡上实现稳定的步态. 2005年, 美国密歇根大学、康奈尔大学、麻省理工学院与荷兰德尔夫特大学的四位学者联名在Science上撰文[26], 指出通过引入微弱的动力源(用于补偿重力), 被动行走机器人可以在平面上实现类似人类一样的自然步态(见图3(a)). 他们构造了三类机器人平台, 其行走能力完全通过机器人身体与环境(重力与斜坡)之间的交互产生(见图3(b)). 这一工作摈弃了传统动力学建模与控制领域对机器人关节控制的严格要求, 使机器人完全依靠自身形态即可实现对整体行为的控制, 成为利用形态计算能力实现复杂行为智能的佐证.

在成功模拟两足机器人之后, 学术界出现了一系列利用形态计算的仿生机器人. 例如拥有主动与被动混合关节的四足机器人Puppy可以方便地感知地形信息[27], 人工鱼Wanda可以利用最少的控制量实现在三维空间的导航[28]. 进一步, 文献[29-30]列举并详细分析了用于实现运动目标检测、操作抓取、四腿行走、水下航行等功能的具身形态计算装置. 近年来, 随着机构、材料等领域的快速发展, 相关的新型形态也不断出现. 例如文献[31]探讨了利用形态计算实现四足机器人的高速运动. 文献[32]利用动态形态计算, 产生蛇形机器人的周期步态. 文献[33]针对自然界和人工系统, 面向触觉的显示、传感与交互阐述了触觉感知中的形态计算. 受沙漠蝗虫启发, 文献[34]研究了动物腿部适应不同地面的控制方法, 并在包括玻璃、沙石、木材和网格表面上开展了机器人动态黏附实验. 此外, 荷兰动感雕塑艺术家泰奥扬森发明的“风力仿生兽”, 可依靠机械原理和自然风力移动前行, 其结构巧妙之处在于合理的利用平衡性进行物理变量的转化, 具有非常高的能源转化率[18]. 总体而言, 这方面的工作主要与机构设计, 甚至艺术创作结合很紧密, 人工设计成分居多, 目前尚缺乏体系化人工智能技术的引导.
**2.2 形态计算的理论模型
关于“形态计算”的实质, 目前普遍认为其强调的是计算的实现, 而非类似图灵机模型那样的计算机理. 由于形态计算的巨大潜力, 不少学者一直在探索其内在的机理, 希望以此来进一步推动形态计算的研究. 考虑到“异或”运算在神经网络发展历史上的重要作用, 文献[35]探讨了利用机器人形态实现异或运算的可能性, 并构建一些思想实验来初步证实了物理身体的动态耦合可以有效地降低控制器设计难度. 文献[36]从可编程动态系统的角度建立了形态计算的形式化分析方法, 指出形态计算不仅适合机器人, 而且还可广泛应用于化学系统、统计物理等科学领域.
尽管形态计算的理论体系尚未建立, 其理论模型也很不完备, 但目前也有发展相对比较成熟的两大类方法: 动态系统方法与信息论方法. 二者并非相互排斥, 而是可以相互补充. 前者的代表性模型是储备池计算模型, 后者的代表性方法则主要是控制器复杂度分析方法. 以下对这两方面的进展分别进行介绍.
3. 基于学习的形态控制
利用学习的方法实现形态控制的主流方法事强化学习. 其核心思想也是利用智能体与环节之间的交互来实现策略的学习. 然而, 具身智能对智能体的结构形态有很高的要求, 而在设计针对这种复杂形态的控制器时, 传统强化学习忽视了形态特点, 而往往是将不同部位的观测量简单拼接, 并直接输出所有控制量, 因此导致搜索空间大, 且难以在不同的形态之间迁移. 当前, 基于学习的形态控制面临的主要问题即在于如何有效地将智能体的形态信息融入控制器学习过程中, 以提升学习效率. 本节首先介绍针对特定形态的强化学习方法关注的基本问题, 包括如何将形态信息引入强化学习、如何实现形态间的迁移, 以及如何处理故障形态等(3.1节). 然后分别针对当前两个重要的热点方法: 图神经网络(3.2节)与Transformer (3.3节)方法, 介绍其研究进展.
**3.1 形态控制的强化学习方法
由于具身智能体形态各异, 要设计一个能适应不同形态的控制器是非常困难的. 文献[64]提出在强化学习的策略网络中将机器人形态与任务分解的方法. 为了设计统一的策略, 文献[65]指出策略应该根据当前的状态, 以及智能体形态自身能达到的能力来确定下一时刻的动作行为. 因此, 以θ 参数化的控制策略πθ(⋅) 不仅应与状态st 相关, 还应与智能体形态的嵌入表示(Morphological latent embeddings, 记为vh) 相关. 为了解决形态的向量表示, 作者提出了显式编码与隐式编码的策略. 显式编码就是将具身智能体不同关节的相对位姿逐一拼接形成表示向量, 可以方便建模运动学结构. 这种编码方式利用了一些先验信息, 但其编码方式限于简单拼接, 因此仅适用于串联型形态, 对更复杂的形态难以适用. 隐式编码的方法则是在优化迭代学习策略πθ(at∣st,vh) 过程中, 不仅优化策略πθ , 同时也对形态的表示vh 进行迭代优化, 即算法不仅搜索从状态到动作的最优映射, 同时还可以发现形态的最优表示. 尽管这一方法在同类型不同自由度智能体上体现了较好的迁移能力, 但由于在学习过程中需要同步迭代优化计算形态的嵌入表示, 这不仅带来了新的优化难度, 而且并没有充分利用智能体自身的形态先验信息. 利用强化学习方法实现形态控制的主要目的是要解决在不同形态之间的迁移问题. 对于不同形态的智能体, 由于对应的状态空间和动作空间都不相同, 直接的策略迁移很难实施. 为此, 文献[66]提出利用层次化分解的策略, 仅仅迁移高层策略, 而底层策略仍独立学习. 然而, 由于高层策略与底层策略的耦合, 这种方法存在一个问题, 即如果不同形态的智能体的底层策略显著不同, 则高层策略的迁移也很难成功. 为此, 作者引入互信息来极小化形态与底层行为之间的差异, 从而实现不同形态智能体底层策略的对齐. 此外, 文献[67]将工具也作为身体的一部分(Tool-as-embodiment), 利用同样的表示空间来表示手−物, 以及工具−物体之间的关系, 因而可以用单一策略来递归操作物体. 文献[68]针对形态故障问题, 提出了对抗强化学习的方法. 总体来说, 当前将形态信息融入强化学习机制实现可迁移的策略学习已成为形态控制的重点研究问题. 受机器人形态复杂度的影响, 早期的研究工作比较零散. 近年来, 图神经网络、Transformer等工具发展迅速, 为具身形态控制的高效学习提供了新的有效思路.
3.2 基于图神经网络的形态学习控制
在强化学习领域有不少将图结构引入提升学习效率的工作, 但大都限于用图结构来描述智能体所处的环境, 而不是智能体的形态本身[69-70]. 事实上, 很多机器人, 甚至动物的身体形态都可以描述为离散图结构G=(V,E) . 其中图的节点v∈V 可以表示智能体的关节, 而边e∈E 则可以代表关节之间的依赖关系(可以是物理的, 也可以是非物理的). 描述这种关系的有力工具就是图神经网络(Graph neural network, GNN)[71]. 在图神经网络中, 每个结点利用自身历史状态和接受到其他节点的消息来更新自身的状态, 因而可以利用类似分布式计算架构中的同步消息传递机制来实现前向推理, 在处理不同形态(对应不同的状态维数和动作空间维数)方面具有很大的优势, 这一特点吸引了很多学者的关注. 文献[72]提出了一种名为NerveNet的模型来将智能体的形态结构信息融入控制器学习中(见图8(a)). NerveNet中的每个节点都从观测向量中获取自己需要的输入信息, 然后通过对其进行处理后作为消息传递给邻域节点, 并更新每个节点的隐藏状态. 假设第k 个执行机构对应的策略为πθ,k(akt∣st) , 则所有节点的输出模型组合产生了控制策略:
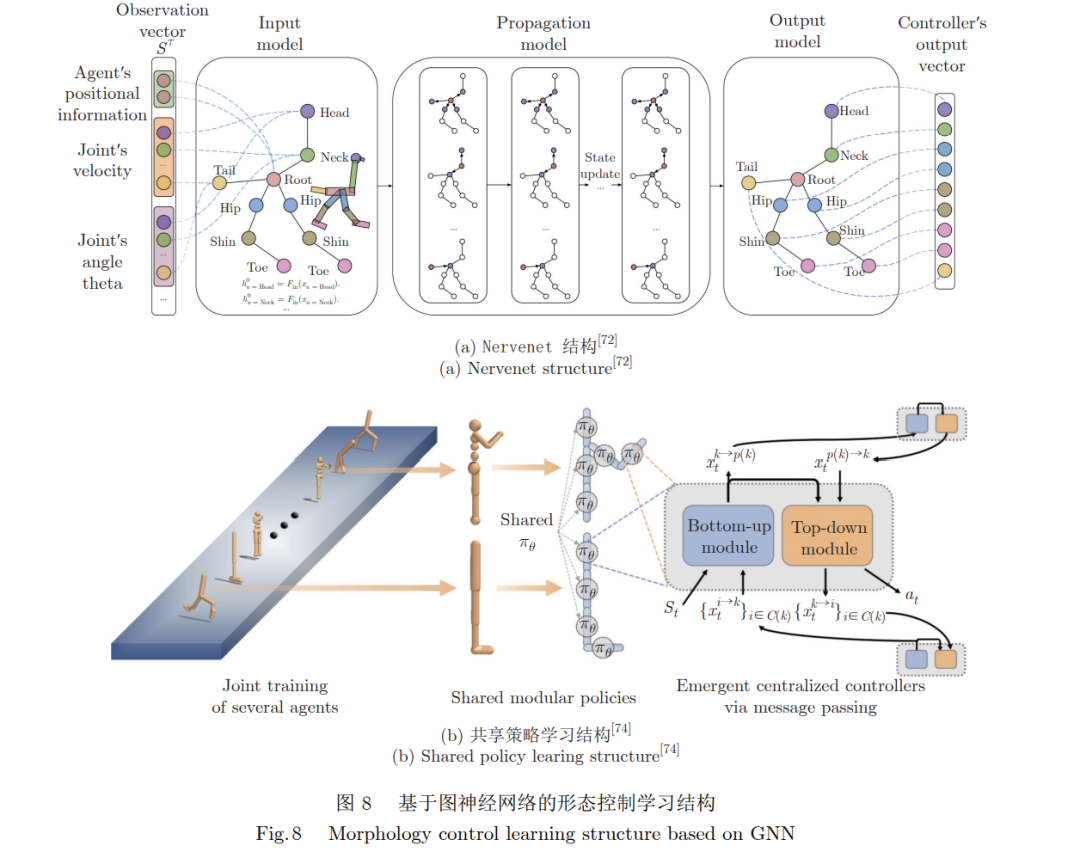
整体上, 利用图神经网络的基本出发点是智能体的形态可以产生对控制器学习有益的归纳偏置(Inductive bias). 但是, 目前能处理的智能体自由度、类型仍然较少, 在适应显著差异的形态之间的高效迁移方面还需深入研究.
**3.3 基于Transformer的形态学习控制
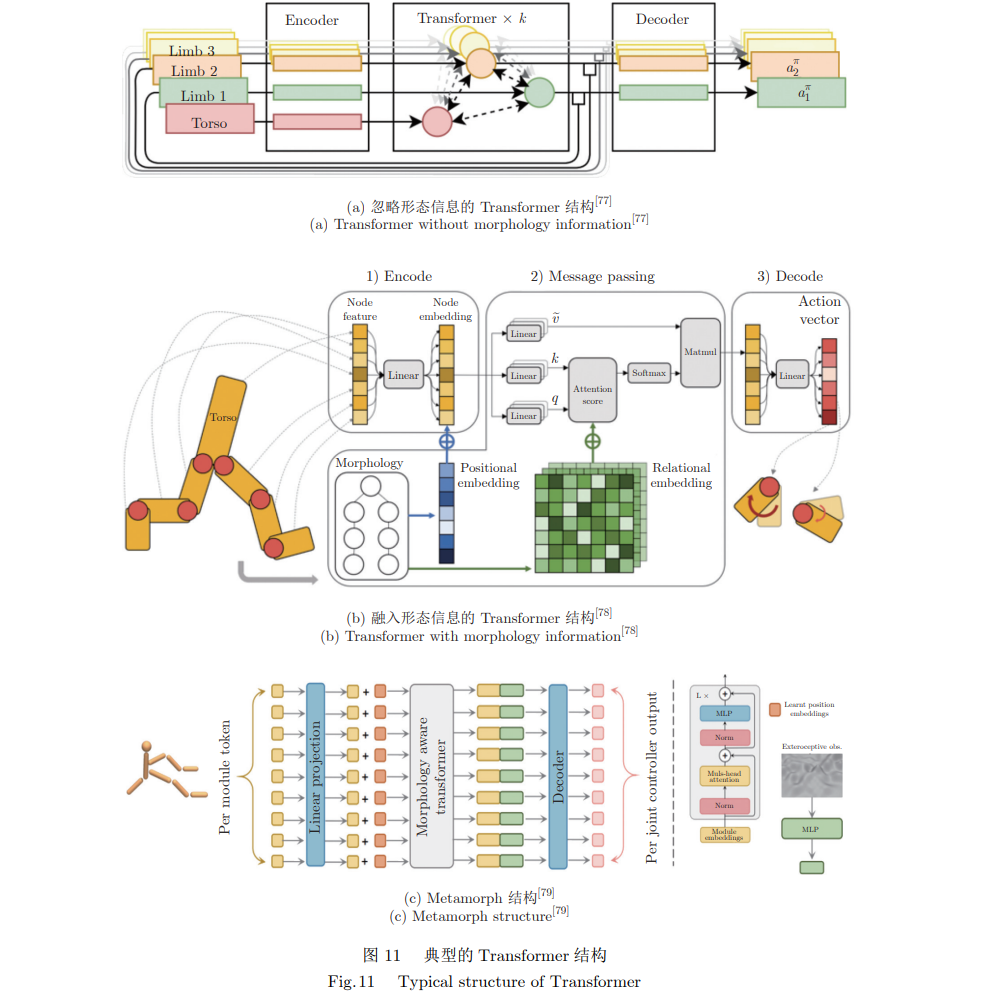
尽管图结构在形态控制中发挥了重要作用, 但由于具身智能体的形态一般都是稀疏图结构, 在多轮消息传递中很多关键信息容易被淹没, 即导致“过平滑”(Over-smoothing)问题. 近年来, Transformer作为一种基于自注意力机制的模型得到了高度关注[76]. 如果将注意力设计为边缘到顶点的集结算子, 则Transformer就可以看成全连接图上的图神经网络. 因此, 文献[77]直接利用Transformer来实现不同部件之间的消息传递(见图11(a)中的虚线箭头), 而编码器与解码器则可分离作用于不同的部件. 尽管这一方法充分体现了Transformer的潜力, 但其忽略了机器人的真实物理形态的影响. 文献[78]进一步揭示了智能体节点的位置信息对于自注意力机制的作用, 将形态(主要是position)信息嵌入Transformer模型(见图11(b)), 用于异构形态的联合策略学习, 克服了常规图神经网络中稀疏结构造成的过平滑问题.
受到高维、非线性、强耦合等因素影响, 利用强化学习方法实现复杂智能体的形态控制是一个很挑战的任务. 然而, 机器人自身的形态提供了非常重要且有用的先验信息, 可以显著地约束搜索空间. 因此, 这方面的的主要科学问题就是如何将形态的信息以恰当的方式引入学习算法提升学习效率, 以及保证迁移到其他未知形态时的性能, 以体现“形态福”. 这方面目前代表性的方法包括使用图神经网络来表示形态结构, 以及利用Transformer结构来刻画形态特点. 当前这些工作主要仍都集中在仿真环境里居多, 学习出的策略在迁移到物理系统时会遇到很多困难. 另一方面, 针对不同形态的机器人特点设计统一的形态控制器尽管很具有吸引力, 但其难度也相当大. 受到近年来在语言、视觉等领域中预训练大模型的启发, 能否为不同形态的智能体建立统一的预训练大模型也是未来重要的发展方向.
4. 基于学习的形态优化
上面两节分别回顾了形态计算与形态控制的相关重要进展. 其中形态计算部分要求人工设计精巧的结构形态, 这对于设计者来说是一件非常挑战的任务. 如果能将形态设计的过程自动实现, 则可显著推动形态智能的研究. 另一方面, 形态控制部分主要是在学习框架下以不同形式融入形态的信息来提升控制器学习效率和泛化能力. 这种基于学习的控制器设计思路, 也可以自然地推广到形态的设计中, 从而实现形态与控制的联合优化学习.
利用学习思想实现脑−体协同进化在具身智能研究的早期就得到了充分的重视[4], 有时也称为进化机器人、人工生命等. 但早期的研究主要侧重于利用进化学习算法优化特定形态机器人的控制策略, 而并不能影响机器人的形态[80].
5. 总结与展望
本文针对形态计算, 形态控制, 以及形态−控制的协同优化等三个重要问题展开了探讨, 回顾相关的重要进展. 具体来说, 我们从物理装置和理论模型两方面分析了基于形态计算的行为生成, 从不同的算法角度分析了基于学习的形态控制, 从仿真环境与物理实现两个角度分析了基于学习的形态优化, 并以软体机器人作为典型案例具体分析了相关进展.
需要强调的是, 在图1中的体系结构中, 虚线部分所表示的“利用行为实现学习”是具身智能研究中最前沿的方向. 尽管机器学习作为人工智能的一个重要分支已经发展多年, 但其主要学习范式仍是基于已采集的数据样本进行学习, 而对样本的搜集过程关注不够. 主动机器学习等技术在一定程度上考虑了样本的使用问题, 但仍并没有解决与环境交互过程中的数据采集问题. 而基于智能体具身行为的学习机制可以将数据的采集、模型的学习融为一体, 真正实现主动交互的学习, 这也是对人类学习过程的更高级模拟. 但是目前这方面的研究工作才刚刚起步, 其主要特点都是针对主流的视觉感知任务, 研究如何通过导航的方式高效地获取训练样本. 例如, 针对目标检测任务, 文献[149]引入语义好奇机制为具身智能体设计了获取有效信息的行为策略, 文献[150]进一步引入自监督学习机制设计了持续改进目标检测器的方法. 文献[151-152]分别针对目标分割和3D目标检测开展了相关的研究. 文献[153]还研究了直接利用机器人具身特性实现视−触觉联合特征学习. 这方面的研究工作目前还在迅速发展.
作为全文总结, 我们将上述各方面内容视为一个整体, 从具身智能的宏观角度重新审视这一问题. 图22是对这一问题的整体总结. 当前, 形态的设计与生成依赖人工因素较多, 依托形态计算实现形态控制是形态智能的核心, 但目前能实现的功能仍比较局限, 对于复杂的形态与功能要求, 大都还需要基于强化学习的方法. 进一步, 在形态控制基础上结合进化优化搜索合适的形态是实现形态设计与生成的未来发展方向, 目前这方面的工作已有长足的发展, 但尚难以支撑真实物理环境下的复杂形态生成.
5. 总结与展望
本文针对形态计算, 形态控制, 以及形态−控制的协同优化等三个重要问题展开了探讨, 回顾相关的重要进展. 具体来说, 我们从物理装置和理论模型两方面分析了基于形态计算的行为生成, 从不同的算法角度分析了基于学习的形态控制, 从仿真环境与物理实现两个角度分析了基于学习的形态优化, 并以软体机器人作为典型案例具体分析了相关进展.
需要强调的是, 在图1中的体系结构中, 虚线部分所表示的“利用行为实现学习”是具身智能研究中最前沿的方向. 尽管机器学习作为人工智能的一个重要分支已经发展多年, 但其主要学习范式仍是基于已采集的数据样本进行学习, 而对样本的搜集过程关注不够. 主动机器学习等技术在一定程度上考虑了样本的使用问题, 但仍并没有解决与环境交互过程中的数据采集问题. 而基于智能体具身行为的学习机制可以将数据的采集、模型的学习融为一体, 真正实现主动交互的学习, 这也是对人类学习过程的更高级模拟. 但是目前这方面的研究工作才刚刚起步, 其主要特点都是针对主流的视觉感知任务, 研究如何通过导航的方式高效地获取训练样本. 例如, 针对目标检测任务, 文献[149]引入语义好奇机制为具身智能体设计了获取有效信息的行为策略, 文献[150]进一步引入自监督学习机制设计了持续改进目标检测器的方法. 文献[151-152]分别针对目标分割和3D目标检测开展了相关的研究. 文献[153]还研究了直接利用机器人具身特性实现视−触觉联合特征学习. 这方面的研究工作目前还在迅速发展.
作为全文总结, 我们将上述各方面内容视为一个整体, 从具身智能的宏观角度重新审视这一问题. 图22是对这一问题的整体总结. 当前, 形态的设计与生成依赖人工因素较多, 依托形态计算实现形态控制是形态智能的核心, 但目前能实现的功能仍比较局限, 对于复杂的形态与功能要求, 大都还需要基于强化学习的方法. 进一步, 在形态控制基础上结合进化优化搜索合适的形态是实现形态设计与生成的未来发展方向, 目前这方面的工作已有长足的发展, 但尚难以支撑真实物理环境下的复杂形态生成.

