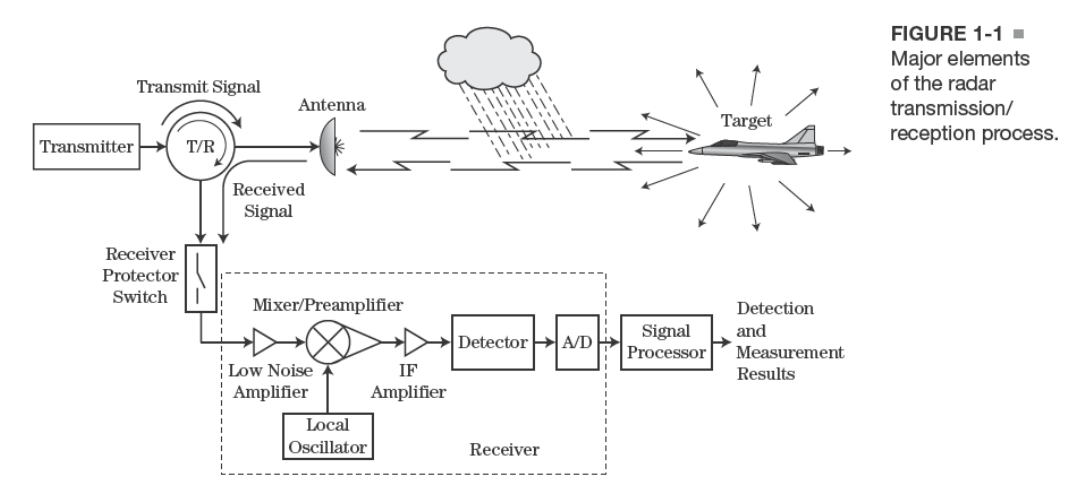
《现代雷达原理:基本原理》(POMR) 分为四个主要部分: 概述、雷达环境、雷达子系统以及信号和数据处理。在讲授雷达这样一个广泛的技术领域时,很难设计一个从头到尾直线进行而无需瞻前顾后的专题序列。概述部分解决了这一问题,它通过高水平的第一道关卡,让读者熟悉雷达的一系列基本概念和问题,为在其余部分中进行更详细的研究奠定基础。第 1 章介绍了电磁波特性、目标和杂波回波、单静态和双静态雷达以及噪声探测等基本概念。该章还通过描述广泛的军事和商业应用来说明雷达技术的范围。最后,第 1 章介绍了一些雷达文化信息,如 “波段 ”术语(如 L 波段、X 波段)和美国军用系统的 AN 术语。第 2 章深入探讨雷达中最基本的数学模型--雷达测距方程。首先推导出基本的点目标测距方程,并探讨其含义。然后,本章针对特定雷达模式开发了几种常见的变体。第 3 章深入探讨了雷达最基本的任务--搜索和探测,描述了搜索过程,介绍了统计探测的概念以及由此产生的概率在评估雷达性能中的重要性。
第 2 部分 “雷达环境 ”是POMR的真正特色之一。即使有,也很少有雷达入门书籍能像这本书一样,对传播效果以及目标和杂波特征进行广泛而深入的讨论。第 4 章介绍了对雷达具有重要意义的所有主要电磁传播现象,从各种天气条件下的简单衰减到折射、衍射、多径、导管和超视距传播等更复杂的问题。第 5 章总结了有关大气、陆地和海洋杂波反射率和多普勒特性建模的大量数据,并介绍了杂波分析所需的许多常用平均反射率和统计模型。第 6 章介绍了目标的散射和反射机制以及雷达截面的概念,第 7 章介绍了评估探测性能所需的常用雷达截面统计模型。第 8 章更深入地探讨了多普勒频移,集中介绍了静止和移动目标以及雷达平台的多普勒频谱的典型特征。
第 3 部分 “雷达子系统 ”介绍了典型现代雷达系统的各个主要子系统。第 9 章介绍雷达天线技术,从天线的基本概念和关系开始,然后介绍经典的单脉冲和机械扫描天线。本章一半的篇幅用于介绍现代相控阵,详细讨论了阵列模式、宽带效应和阵列结构。第 10 章介绍雷达发射机技术,包括大功率热离子(管式)非相干和相干发射机,以及固态发射机技术。此外,本章还重点介绍了现代相控阵的发射机模块和馈电结构。本章还涉及频谱分配和发射机可靠性问题,这些都是其他入门教科书中没有的内容。第 11 章介绍雷达接收机技术,从最基本的类型开始,扩展到多级超外差接收机。书中讨论了噪声和动态范围问题,并介绍了传统的模拟同步探测器以及日益流行的相干系统直接采样数字接收机技术。第 12 章对相干激励器的介绍在入门教科书中是独一无二的,但对于理解现代系统的结构却非常重要。介绍了激励器的性能问题,随后讨论了实现现代相干雷达激励器的可用技术。此外,还解释了脉冲多普勒系统保持低相位噪声的重要性。本教科书的另一个独特主题是第 13 章,其中讨论了雷达数字信号处理器技术。介绍了估算处理器负载的指标和程序,随后讨论了定制集成电路、可重新配置硬件等替代实施技术,以及使用图形处理单元进行实时信号处理等令人兴奋的新技术。
第 4 部分 “信号和数据处理 ”集中介绍了利用先进的数字信号和数据处理技术从雷达信号中提取更多信息的日益复杂的技术。第 4 部分的前半部分涉及信号处理基础、探测和杂波抑制。第 14 章首先简明扼要地总结了数字信号处理器的基本原理,如采样、量化和数据采集,然后全面回顾了离散傅里叶分析,包括窗口和插值。其他章节让读者重新认识了数字滤波器、随机信号的特性,以及最重要的匹配滤波器概念及其与数据整合的联系。第 15 章回到第 3 章首次介绍的阈值检测主题。这里更多关注的是相干和非相干集成的细节,以及使用可用数据的其他方法。介绍了 Neyman-Pearson 检测和 Swerling 模型,从而得出雷达信号的最佳检测器。介绍了阿尔伯斯海姆方程和施奈德曼方程,作为方便的计算辅助工具。第 16 章继续讨论恒定误报率(CFAR)阈值检测,这是实际干扰环境中的一个实际要求。该章深入讨论了基本的小区平均 CFAR 的特性、性能和缺点,然后介绍并比较了许多常见的 “鲁棒 ”和 “自适应 ”CFAR 变体。第 17 章介绍了用于减少杂波的两种主要多普勒处理方式:移动目标指示(MTI)和脉冲多普勒处理。对 MTI 的讨论包括盲速、交错脉冲重复频率和机载 MTI。有关脉冲多普勒处理的章节介绍了盲区和模糊解决等重要主题。本章还简要讨论了气象雷达中广泛使用的脉冲对处理方法。
在第 4 部分的后半部分,重点转向探测后位置测量和跟踪以及高分辨率技术。第 18 章涉及测距、测角和多普勒的位置测量。精度和准确度的基本概念引出了 Cramèr-Rao 精度下限。然后介绍了几种测距、多普勒频移和角度估计器,并对其性能进行了评估。本章自然引出第 19 章的跟踪算法介绍。在讨论了基本参数估算以及使雷达跟踪复杂化的一些数据关联和分辨率问题后,介绍了从基本的 α-β 跟踪器到卡尔曼滤波器等多种跟踪算法。第 20 章和第 21 章介绍了实现高分辨率雷达成像所需的技术。第 20 章介绍了高分辨率脉冲压缩技术。对匹配滤波器进行了更深入的研究,然后将其应用于最常见的宽带波形,包括线性频率调制或 “啁啾 ”以及从巴克码到各种多相码的相位编码波形。本章介绍了范围挎叶控制方法,并介绍了模糊函数作为设计和理解波形特性的一种手段。最后,第 21 章概述了合成孔径雷达 (SAR) 成像。该章介绍了合成孔径雷达数据采集,并推导出了广泛适用的通用分辨率和采样方程。虽然合成孔径雷达图像形成算法的范围太广,对入门教科书来说也太高深,但还是对两个极端进行了描述: 多普勒波束锐化是最简单的成像算法之一;反投影是目前高级成像的 “黄金标准”。本章最后讨论了合成孔径雷达成像的独特现象,包括悬浮、阴影和斑点。总之,《POMR》第 4 部分对信号处理的广泛介绍为研究更高级的课题(如高级合成孔径雷达、时空自适应处理和多输入多输出雷达)提供了绝佳的跳板。