摘要—密集的三维环境表示一直是机器人领域的长期目标。尽管之前的神经辐射场(NeRF)表示因其基于坐标的隐式模型而广泛应用,但最近出现的三维高斯溅射(3DGS)在显式辐射场表示方面展示了显著潜力。通过利用三维高斯基元进行显式场景表示并实现可微渲染,3DGS在实时渲染和逼真性能上比其他辐射场有显著优势,这对于机器人应用极具益处。在本综述中,我们对3DGS在机器人领域的应用进行了全面分析。我们将相关工作的讨论分为两个主要类别:3DGS的应用及其技术进展。在应用部分,我们从场景理解和交互的角度探讨了3DGS在各种机器人任务中的应用。而在技术进展部分,我们聚焦于3DGS在适应性和效率方面的改进,以期提升其在机器人领域的性能表现。随后,我们总结了机器人领域中最常用的数据集和评估指标。最后,我们识别了当前3DGS方法的挑战与局限,并探讨了3DGS在机器人领域的未来发展方向。索引词—三维高斯溅射,机器人,场景理解与交互,挑战与未来方向
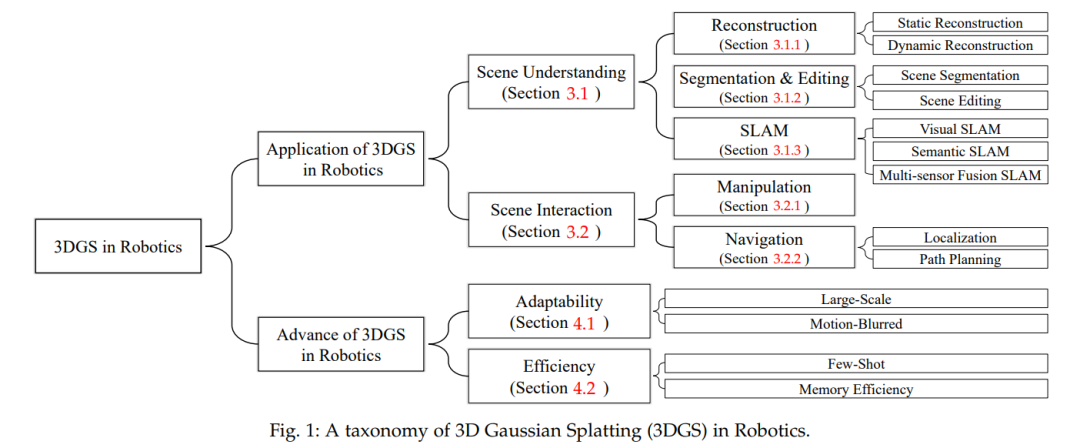
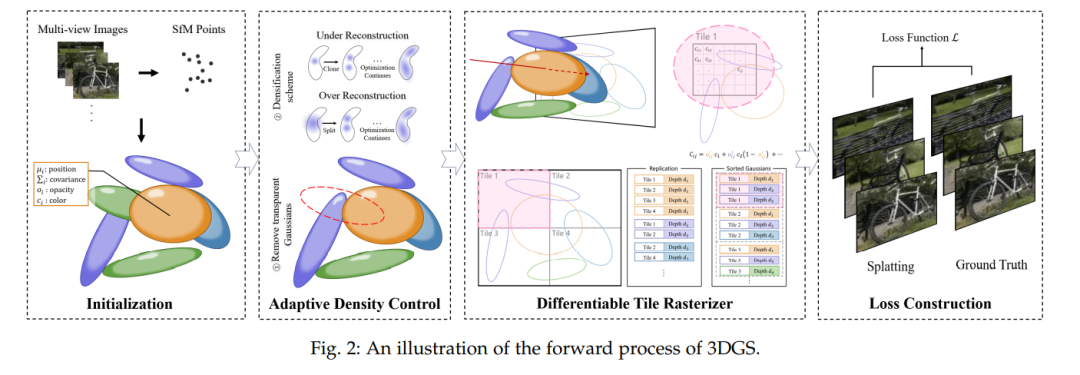
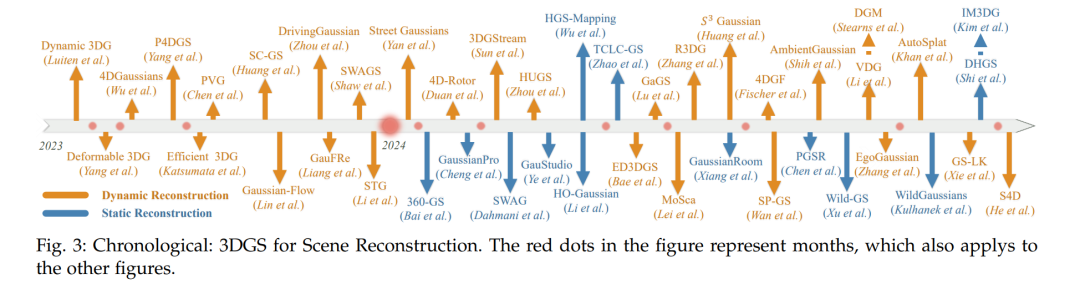
神经辐射场(NeRF)的出现推动了机器人领域的发展,特别是在感知、场景重建和环境交互方面提升了机器人的能力。然而,这种隐式表示在优化过程中,由于逐像素光线投射渲染的低效性而受到限制。三维高斯溅射(3DGS)的出现通过其显式表示解决了这一效率问题,并通过溅射实现了高质量和实时渲染。具体来说,3DGS使用一组具有可学习参数的高斯基元来建模环境,为场景提供显式表示。在渲染过程中,3DGS通过溅射将三维高斯映射到给定摄像机位置的二维图像空间,并使用基于切片的光栅化器进行加速,从而实现了实时性能。因此,3DGS在提升机器人系统性能和扩展其能力方面具有更大的潜力。自2023年3DGS问世以来,已有多篇综述论文[4]、[5]、[6]、[7]、[8]、[9]展示了该领域的发展。Chen等人[4]首次综述了3DGS的发展历程和关键贡献。Fei等人[5]提出了一个统一框架,用于对现有3DGS工作进行分类。Wu等人[7]则提供了一份包含传统溅射方法与新兴的基于神经网络的3DGS方法的综述,展示了3DGS溅射技术的发展。Bao等人[9]基于3DGS技术提供了更详细的分类。此外,Dalal等人[6]聚焦于3DGS中的三维重建任务,而Bagdasarian等人[8]则总结了基于3DGS的压缩方法,展示了3DGS在特定领域的优势与不足。然而,现有的3DGS综述要么对3DGS工作进行广泛的分类,要么聚焦于3DGS的实时视图合成,缺乏对机器人领域的详细总结。因此,在本文中,我们对机器人领域中的3DGS进行了全面总结和详细分类。我们介绍了3DGS在机器人中的应用,并详细分类了与机器人应用相关的3DGS研究。此外,我们总结了增强3DGS表示以适用于机器人系统的潜在解决方案。最后,我们展示了基于3DGS的工作的性能评估,并讨论了3DGS在机器人领域的未来发展。本综述的整体框架如图1所示。第二部分简要介绍了3DGS的核心概念和数学原理。第三部分将3DGS在机器人中的各种应用方向进行分类,并详细介绍了相关工作的分类。第四部分讨论了改进3DGS表示以增强其在机器人任务中的能力的各种进展。此外,在第五部分中,我们总结了用于3DGS机器人应用的数据集和评估指标,并比较了现有方法在不同机器人方向上的表现。第六部分探讨了3DGS在机器人领域的挑战和未来方向。最后,第七部分总结了本次综述的结论。