
从全局到局部:面向视频动作分割的高效网络结构搜索
Global2Local: Efficient Structure Search for Video Action Segmentation
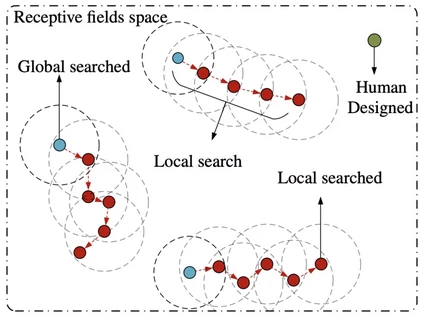
为了回答“是否可以通过高效地搜索不同感受野的之间的组合来替代手工设计的模式呢?”的问题,在本文中,我们提出一种基于从全局到局部的搜索策略来寻找更合适的感受野组合。具体而言,我们的搜索策略将利用全局搜索的优势来找到粗粒度的参数组合,而后在利用局部搜索来精细化感受野的组合模式。值得指出的是,全局搜索并非是通过手工设计模式来寻找潜在的粗粒度参数组合。在全局搜索的基础上,我们将会使用一种基于期望引导迭代的方式来有效地精修参数组合。最后,我们的这一结果可以即插即用地使用在当前动作分割的模型中,并取得了SOTA的效果。很快我们也将开源我们的代码实现。

https://www.zhuanzhi.ai/paper/984e0db8caf9022e6b67396d1d49ee1b
成为VIP会员查看完整内容
相关内容
Arxiv
10+阅读 · 2020年3月13日
相关VIP内容
相关资讯
相关论文
Arxiv
10+阅读 · 2020年3月13日