
磁导航(MagNav)有可能提供一种不依赖外部信号的全球导航形式。磁导航使用地球异常磁场的磁场测量值,并将这些测量值与磁异常地图进行比较,以确定用户的位置。
要广泛使用 MagNav,就必须建立一个全面采样的低空磁异常图数据库。现有的磁异常地图数据库通常来自采样不足或采样不佳的勘测。在这项工作中,提供了一个易于遵循的 MagNav 异常图生成框架和一套勘测采集指标/要求,以帮助促进此类数据库的创建并使其标准化。
本文探讨了进行磁异常勘测并生成与 MagNav 一起使用的地图所需的必要设备、传感器和软件算法。研究表明,可以使用一个或多个低成本固定翼无人飞行器 (UAV) 进行航空磁测,只需使用最少的商用现成 (COTS) 航空电子设备/传感器,在某些情况下还不需要当地的地面磁参考站或飞行连接线。
现有的磁异常地图侧重于地质解释。这项工作提出了对侧重于导航潜力的异常地图的要求。它进一步描述并实施了从机载数据创建可导航地图的过程。最后,提出了一种新方法,用于估算在没有专用本地参考磁强计的情况下进行航空磁测时遇到的昼夜和空间天气相关磁噪声。
本文对不同的航磁勘测过程和算法进行了模拟建模,以验证 MagNav 测绘框架,并就何时使用某些过程和算法而不是其他过程和算法提供见解。然后,将经过验证的 MagNav 测绘框架应用于创建飞行测试区域的磁异常图,并以此作为用例。
最后,介绍了一种新方法,用于估算在没有专用本地参考磁强计的情况下进行航空磁测量时遇到的时间磁噪声。
几乎所有现代飞机,无论是军用还是民用,都严重依赖全球导航卫星系统(GNSS)解决方案进行导航。虽然基于全球导航卫星系统的导航允许用户使用低成本硬件快速准确地确定自己的绝对位置,但在飞行过程中一旦全球导航卫星系统信号不可用时,仍需要一个备用导航解决方案。目前,磁导航(MagNav)是在缺乏全球导航卫星系统的环境中最有前途的替代导航方法。这是因为磁导航解决方案所使用的磁异常场在白天和夜晚均可使用,不受天气或地形影响,可通过被动传感器探测,几乎不可能被干扰或欺骗,但需要使用异常地图。广泛采用磁导航的最紧迫问题之一是严重缺乏覆盖整个美国的低空、充分采样的磁异常地图。几乎所有公开的磁异常地图都是为地质勘探(即定位金属矿藏)而生成的,没有进行充分采样,而且旧版地图还存在像素地理定位错误。这意味着在现有的有限的几个磁性地图数据库中,没有一个适合在美国与 MagNav 一起使用,因此必须创建一个新的数据库。由于用于创建磁异常地图的流程和软件算法大部分都是专有的,要填补导航地图可用性方面的空白,就必须开发一个低成本、开源和详细的端到端磁异常地图创建框架。
这项工作的主要研究目标是为端到端磁异常地图创建开发一个详细的框架。该框架将具有高度灵活性,可为希望为 MagNav 创建磁异常地图的各类用户提供全面指导。没有航空磁测经验的个人或研究小组应该能够使用该框架以相对低廉的成本绘制自己的高质量磁异常图。该框架将涵盖数据采集和处理的所有主要方面,包括传感器/车辆选择、传感器/车辆校准、勘测路径规划、从勘测数据中去除非异常磁场成分、地图平差、地图插值和地图文件格式。
另一个研究目标包括设计一种新算法,使用户能够利用距离勘测区域数千公里的磁参考站的数据,消除勘测数据中的昼夜效应和空间天气效应。这将大大改善目前文献中普遍接受的航空磁测最大距离 100 公里的情况。这种算法可能会使本地磁参考站的需求变得不必要,并降低航磁测量的总体成本。此外,我们还就全采样磁异常地图的最大采样距离要求提出了更新、更准确的指导意见。目前,人们普遍认为勘测样本之间只需相隔 h 的距离(h 为勘测 AGL(地面以上高度))即可视为完全取样。然而,MagNav 异常点地图的采样必须在相邻样本间距不大于 h/2 的情况下才能捕捉到整个磁异常点的空间频率。内容。
为了使勘测数据处理具有可访问性和可扩展性,为这项研究工作开发的大部分勘测数据处理软件被编译成一个 Python 库,名为 “空中和陆地磁异常地图制作(MAMMAL)”。MAMMAL 库可以解析各种磁数据和其他传感器数据文件、磁异常地图和勘测飞机自动驾驶仪飞行日志。解析完成后,可对数据进行适当的进一步处理,以生成磁异常图。这包括数据过滤、去除已知噪声源、传感器/飞行器校准、地图/飞行线平整、地图插值以及将地图导出为建议的 MagNav 标准数据格式(见附录 D)等功能。拟议的标准 MagNav 地图格式是 GeoTIFF,其中包含有关所用勘测设备和处理过程的大量背景信息以及若干数据带。
这种标准化的 MagNav 地图格式将大大简化大量航空磁异常地图的融合和数据库化过程。导航界采用这一标准将确保航空磁异常地图与未来 MagNav 算法的无缝互操作性。最后,利用在阿特伯里营(印第安纳州爱丁堡)无人飞行器(UAV)飞行试验场收集的勘测数据绘制了一系列磁异常图,用于磁导航研究。开发的航空磁场框架和 MAMMAL 库均用于创建和评估这些勘测地图,以确定框架和库的实用性。
本论文的其余部分安排如下。第二章讨论了有关地球磁场成分、外部磁源和磁噪声的背景信息,以及当前磁测量技术的文献综述。第三章讨论异常图制作软件包的方法。本章还讨论了如何自始至终绘制和分析阿特伯里营无人机飞行试验场的航磁图。第四章详细介绍了在各种限制条件下运行异常点地图制作软件包的结果,包括模拟和真实的航空磁测数据。第五章分析了第四章的结果,并就如何生成和保存 MagNav 航空磁异常图提出了一个标准化框架。第五章还讨论了对未来工作的建议。
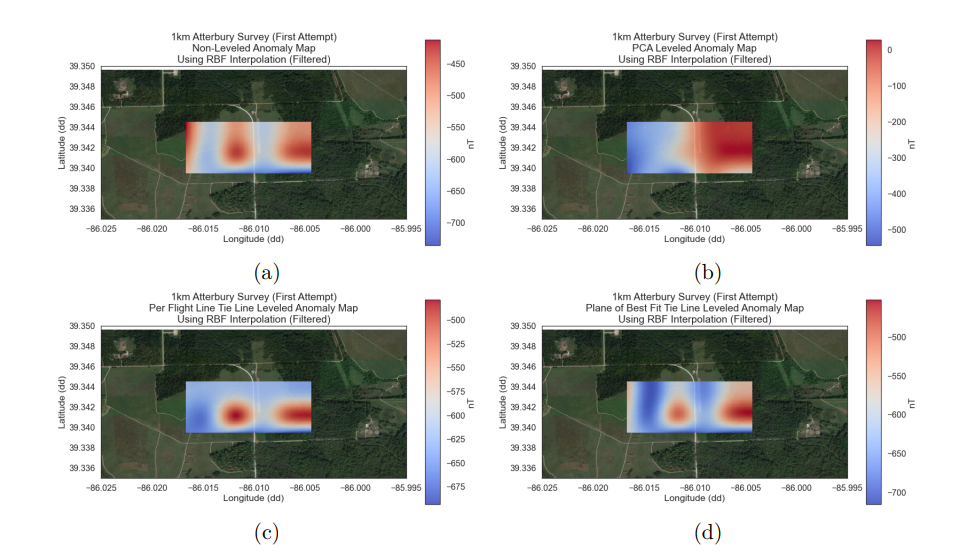
图 51: 阿特伯里首次 1 公里勘测后的地图,采用以下方法进行平差:(a) 不采用任何技术;(b) 利用主成分分析 (PCA) 进行伪平分线平差;(c) 根据所有相交平分线单独平差每条航线;(d) 利用最佳拟合平面同时平差所有航线。

