
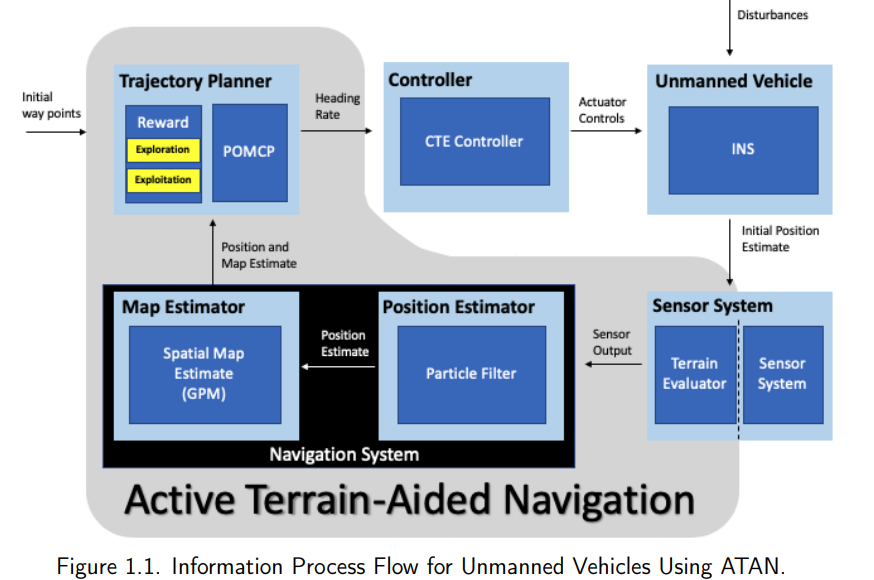
在没有外部信标系统的情况下进行导航是自主系统界的一个长期目标。地形辅助导航(TAN)是外部定位的一种替代方法,但需要事先绘制地图。在许多情况下,无人飞行器(UV)要勘测的区域没有地图,因此无法使用 TAN。主动地形辅助导航(ATAN)将强化学习(RL)纳入 TAN,以减少对先验地图的依赖。空间和时间测量的不确定性造成了探索与利用的经典问题:探索所有地图区域的同时利用已知区域以最小化位置误差。一个双随机优化估计问题通过一个信息论框架(ITF)对探索与开发的两难问题进行建模,该框架能实时实现信息增益最大化:这是一个计算复杂度很高的挑战。使用一种称为部分可观测蒙特卡洛规划过程(POMCP)的 RL 技术可降低计算成本。ATAN 采用 ITF 和 POMCP 为 TAN 提供更好、更灵活的覆盖计划。本论文的结果表明,UV 能够在没有事先地图的情况下自主导航,同时最大限度地减少位置误差,确保全面覆盖,并在时间/能量限制内创建精确的地图。通过 ATAN,UV 展示了更高水平的自主性,不仅改进了 TAN 框架,还为机器人领域提供了更大的发展空间。
成为VIP会员查看完整内容
相关内容

Arxiv
224+阅读 · 2023年4月7日

相关VIP内容
相关资讯
相关论文
Arxiv
224+阅读 · 2023年4月7日