执行摘要
随着海军引进大排量和超大级别的无人潜航器(UUV),即LDUUV和XLUUV,对增加几周到几个月的续航能力的需求和愿望都在增长。延长续航时间是一种必要的能力,使UUV开始承担核潜艇的一些任务领域。能源效率和存储能力是延长无人驾驶航行器续航能力首先要考虑的因素。然而,一个次要的、更具挑战性的因素是无人潜航器系统的可靠性以及其容忍或避免系统故障的能力。海军需要在改进能源容量、能源消耗效率和关键部件的可靠性之外,增加其UUV的续航时间。通过基于状态的维护(CBM)来解决UUV系统的可靠性问题,将提高UUV的平均故障间隔时间(MTBF)率。提高UUV的平均无故障时间以支持数周至数月的任务持续时间是一个关键的能力差距。
本项目的目的是捕捉利益相关者对提高UUV可靠性、可维护性和可用性的需求,然后将这些需求转化为旨在提高UUV系统可靠性的概念系统的系统需求,即基于状态的UUV维护监测和预测系统(C-BUMMPS)。C-BUMMPS架构、UUV接口和系统要求将被提出并展示,以满足利益相关者的需求。具体来说,本项目将开发利益相关者、系统功能和系统非功能要求。开发的架构将包括UUV上的机载传感、监测和处理元素,以及岸上的测试、数据分析和维护活动,以支持C-BUMMPS。
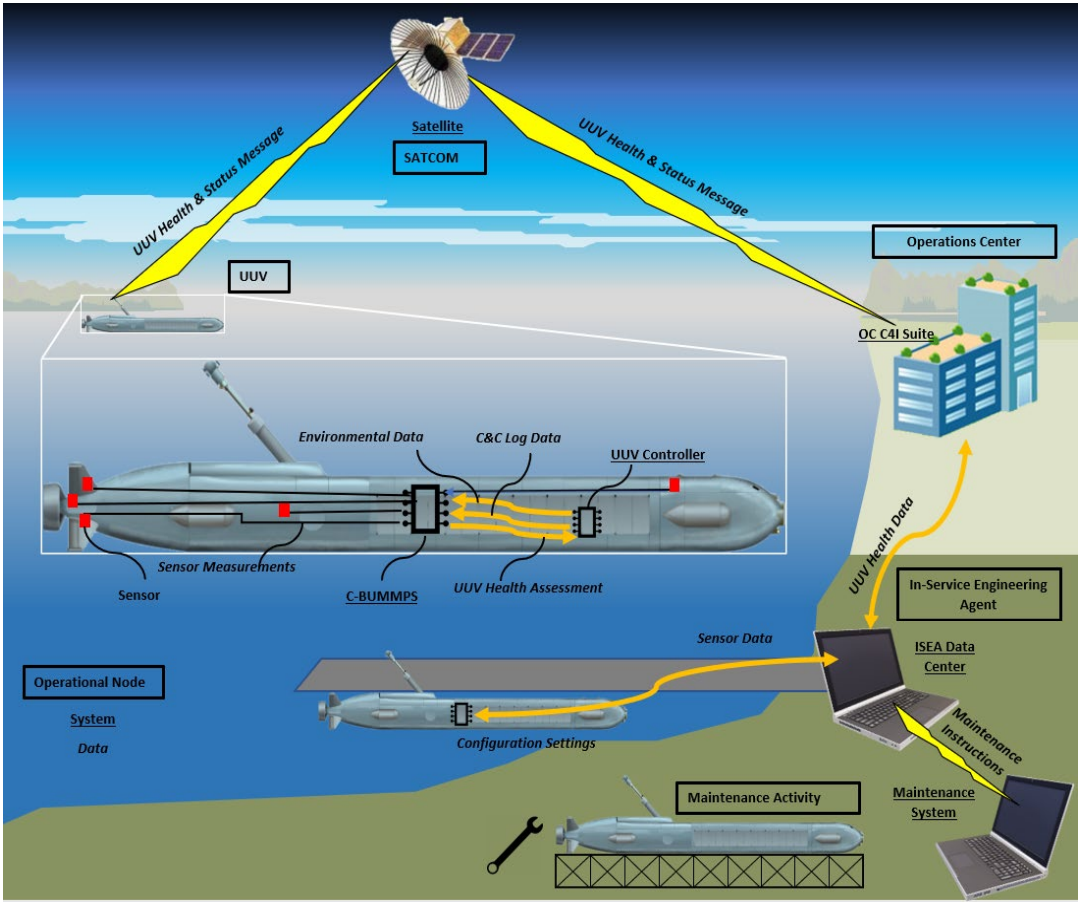
图1描述了C-BUMMPS概念的高级运行视图。按照设想,C-BUMMPS将监测和记录UUV系统、子系统和组件的性能参数。最初的数据收集将形成机载设备的基线性能概况。在役工程智能体(ISEA)将收集、分析并使用这些数据来形成维护和故障预测算法。当UUV执行任务以及其他测试和训练操作时,CBUMMPS将持续监测和记录与环境条件和UUV指挥和控制有关的设备性能。当感觉到异常和非标称性能时,C-BUMMPS将检测潜在的问题和故障模式,并与UUV的健康评估一起传达警报信息。这些信息将被传达给UUV控制器,并通过卫星通信(SATCOM)转发给运行中心。运行中心将决定是否继续或中止任务,并将UUV的健康数据转发给ISEA。然后,ISEA将分析数据并确定UUV返回时要执行的适当的维护行动。这些维护行动将作为维护指令传达给维护活动。当UUV仍在航行时,C-BUMMPS提供的早期信息使维护活动有更多的时间来提前计划和提供维护行动,以便在UUV回港时立即执行。当维修行动完成后,UUV将被测试以验证维修情况,C-BUMMPS将监测UUV,以添加维修或更换设备后的生命周期性能概况。
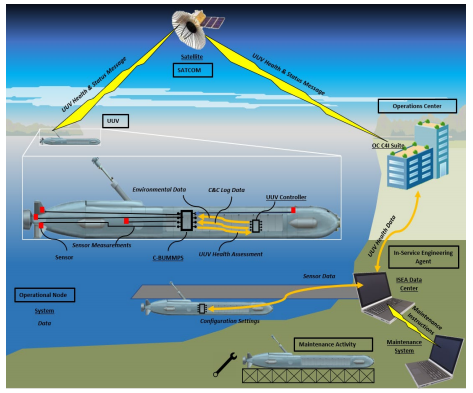
图1. C-BUMMPS运行概念图。改编自Sutton(2019)。
系统工程方法被用来指导这个项目。一项任务分析有助于在正常的UUV操作范围内形成C-BUMMPS的任务。该团队通过查阅文献和与利益相关者的互动收集数据和信息。对利益相关者需求的评估产生了一份利益相关者需求清单。然后进行了需求分析和UUV子系统故障模式分析,以确定潜在的C-BUMMPS系统需求。
该项目采用了数字建模工具,并利用基于模型的系统工程(MBSE)方法,从系统、运行和能力的角度提出C-BUMMPS架构。这包括高层次的操作概念图(OV-1)、资源流(SV-2)、运行活动(OV-5b/6c)、功能块图以及数据和信息流图。最后,将提出一套系统要求,并可作为未来C-BUMMPS的工程建议。此外,还将提供用于本项目的MBSE模型,该模型是在Innoslate中开发的。本项目的系统工程产品可以作为未来在UUV上开发和实施CBUMMPS的一个工程框架。