
硬件技术的进步使得复杂的软件得以更多的整合,引发了无人平台(UV)的发展和使用,并减轻了对机载智能的限制。因此,UV现在可以参与更复杂的任务,环境条件的不断变化需要更高水平的情景响应。本文是对UV任务规划和管理系统的介绍,旨在强调自主水下和空中飞行器领域的一些最新发展,此外还强调了一些可能的未来方向,并讨论了学到的经验教训。在这项研究中,对UV的自主性评估以及自主性的不同方面,如态势感知、认知和决策,进行了全面调查。本文分别解释了仿人系统和自主系统的性能,并强调了人类在UV操作中的作用和影响。

- 1.引言
- 1.1 自主水下航行器(AUV)面临的挑战
- 1.2 无人驾驶飞行器(UAV)面临的挑战
- 2.如何评估自主性水平?
- 2.1 移动性、获取和保护(MAP)
- 2.2 德雷珀三维智能空间
- 2.3 自主控制水平图(ACL)
- 2.4 自主性的谢里登量表
- 2.5 案例研究。各种自主性措施的比较
- 3.自主性与自动化
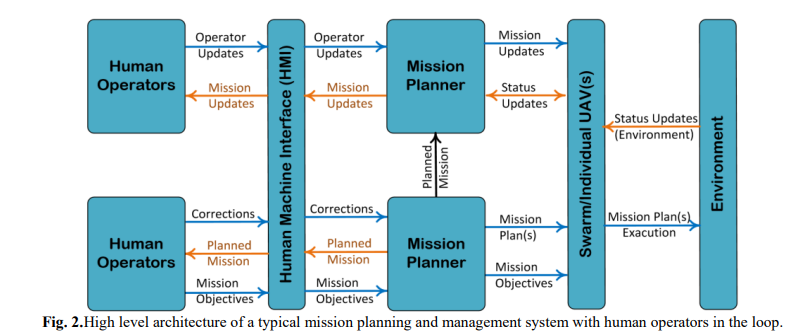
- 4.任务规划-管理系统及其组成部分
- 4.1 什么是态势感知(SA)?
- 4.2 什么是认知?
- 5.基于无人机的任务规划和任务管理系统
- 6.基于AUV的任务规划和任务管理系统
- 7.蜂群机器人场景下的自主任务规划和管理系统
- 8.结论
成为VIP会员查看完整内容
相关内容


相关VIP内容
相关资讯
相关论文