
在一些人道主义、商业和军事应用中,关于浅埋目标的成像、探测和定位的信息是非常令人期待的[1]。通常,在地雷识别、考古挖掘、行星探险和建筑工程等方面,有必要可靠而安全地感知和检索这些信息。虽然有各种各样的技术可用于地下勘探,即辐射测量、地震和电磁(EM),但只有探地雷达(GPR,以下简称GPR)提供非侵入性、安全、高效和高分辨率的感应[1]。这一优势使得过去二十年来,GPR采集和信息检索的研究取得了重大进展。
在脉冲式GPR系统中[2],发射天线在表面发射一个超宽带电磁脉冲。当信号在地表下层传播时,它们的磁和电特性,如许可率、渗透率和导电性,引起散射波的相位和振幅的变化。虽然反射波的振幅与埋藏目标的复合反射率成正比,但相位提供了目标相对于安装在表面的雷达的位置信息。GPR接收器收集并处理反射回波,以提取几个目标的反射率和范围。
在GPR应用中,目标位于雷达的近距离范围内。因此,收到的信号是由同一物体的不同部分的多次反射组成的。这种扩展的目标模型意味着检索多个范围和对应于同一较大物体的部分的振幅。通过利用后向散射信号的点值之间的空间相关性,GPR产生了一个目标特征,这个特征通常是被探测物体所特有的,因此,对识别它是有用的[3]。在本章中,我们重点讨论GPR处理的这个目标识别方面。
通常,目标识别、分类和识别等术语可交替使用,用于从测量的雷达数据中对目标进行分类的技术。然而,就本章而言,目标分类意味着将目标隔离到一个一般的类别,而目标识别则用于更精确地区分目标。例如,将一个目标标记为地雷或土壤杂波是一个分类步骤。将一个地雷目标识别为PMN/PMA是其识别。目标识别包含了分类和识别两个方面[4]。
在实践中,所记录的GPR信号通常会受到系统效应产生的一些不必要的贡献,如天线耦合、多个表面反射、系统不稳定、时间抖动、有限的空间分辨率和振幅变化[5]。此外,感兴趣的目标埋藏在粗糙的地表中,会产生与目标信号强度相当的不需要的杂波信号。因此,GPR目标识别是一项困难的任务。
传统的GPR目标识别方法(见[3]的回顾)包括通过去除嘈杂的信号对数据进行预处理、除噪(高通滤波以去除低频噪声)、过滤、去卷积、迁移(修正测量几何的影响),并且可以依靠GPR反应的模拟。这些技术通常存在信息损失、无法适应先前的结果,以及在强杂波和噪声的情况下性能低下的问题。
为了应对这些挑战,在过去的十年中,已经开发了一些先进的处理方法来提高GPR目标的识别。在本章中,我们对这些现代GPR处理技术进行了概述。特别是,我们集中讨论了以下方法:
- 根据目标环境对测距曲线进行自适应接收处理[6] 。
- 采用基于学习的方法,以便雷达利用先前的测量结果[6, 7] 。
- 采用利用目标场景在某些领域或字典中是稀疏的这一事实的方法[8, 9] 。
- 应用先进的分类技术[10
- 卷积编码,提供目标的简洁和代表性特征[11] 。
我们通过地雷探测的代表性应用来描述这些技术中的每一种或其组合。
本章的其余部分组织如下。在下一节中,我们简要介绍了GPR技术和土壤中电磁波的复杂散射行为。我们描述了GPR信号模型,并在第7.2节中列出了经典和现代的处理方法。我们在第7.3节中解释了用于地雷探测的数据集。第7.4节重点介绍了各种稀疏表示技术,这些技术是由第7.5节中详细介绍的字典学习算法实现的。我们在第7.6节中概述了由雷达处理器进行的自适应统计评估,以便有选择地应用其中一种算法。最后,我们在第7.7节中介绍了所有这些技术的目标识别结果,然后在第7.8节中得出结论。
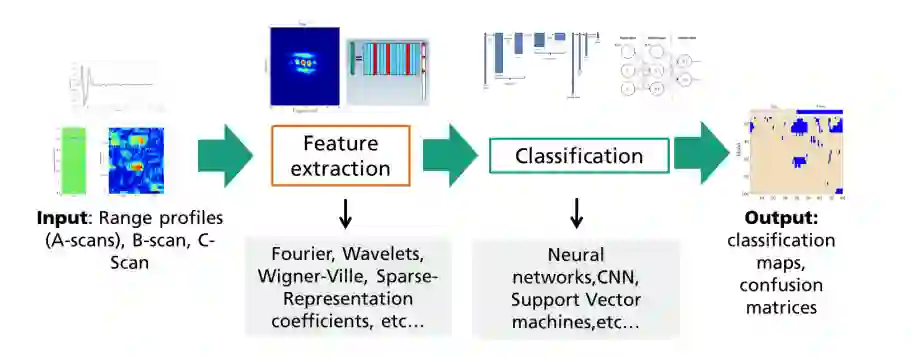
图 7.5 现代 GPR 目标分类的简化流程。需要适当的数据表示来从范围配置文件中提取特征,然后将这些特征提供给高级分类器以从杂波中分离和识别目标


