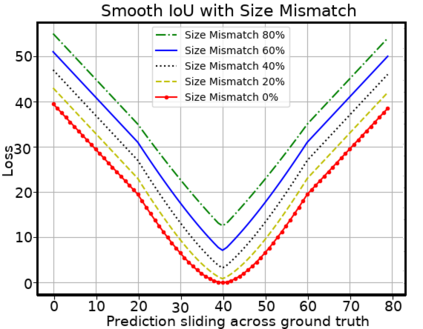
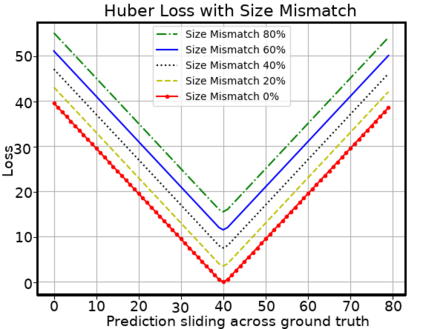
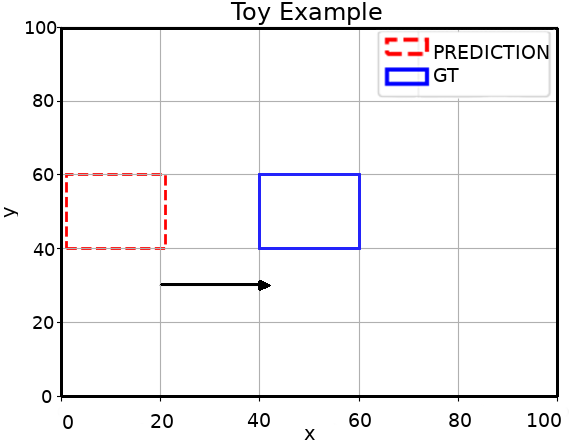
Object detection has seen remarkable progress in recent years with the introduction of Convolutional Neural Networks (CNN). Object detection is a multi-task learning problem where both the position of the objects in the images as well as their classes needs to be correctly identified. The idea here is to maximize the overlap between the ground-truth bounding boxes and the predictions i.e. the Intersection over Union (IoU). In the scope of work seen currently in this domain, IoU is approximated by using the Huber loss as a proxy but this indirect method does not leverage the IoU information and treats the bounding box as four independent, unrelated terms of regression. This is not true for a bounding box where the four coordinates are highly correlated and hold a semantic meaning when taken together. The direct optimization of the IoU is not possible due to its non-convex and non-differentiable nature. In this paper, we have formulated a novel loss namely, the Smooth IoU, which directly optimizes the IoUs for the bounding boxes. This loss has been evaluated on the Oxford IIIT Pets, Udacity self-driving car, PASCAL VOC, and VWFS Car Damage datasets and has shown performance gains over the standard Huber loss.
翻译:目标检测随着卷积神经网络(CNN)的引入在近年来取得了显著进展。目标检测是一个多任务学习问题,需要正确识别物体在图像中的位置和类别。在此文中,我们的想法是最大化真实边界框和预测之间的重叠度(即交并比IoU)。目前在该领域中看到的工作范围内,IoU被近似为使用Huber损失作为代理,但这个间接方法并没有利用IoU信息,也没有将边界框视为四个独立,不相关的回归项。这对于边界框并不是真的,因为四个坐标高度相关,当它们一起被考虑时,具有语义意义。直接优化IoU由于其非凸和非可微的特性而不可能。因此,我们提出了一种新的损失函数,即平滑IoU,它可以直接优化边界框的IoU。这个损失函数已经在牛津IIIT宠物,Udacity自动驾驶汽车,PASCAL VOC和VWFS汽车损坏数据集上进行了评估,并显示出比标准Huber损失更好的性能。