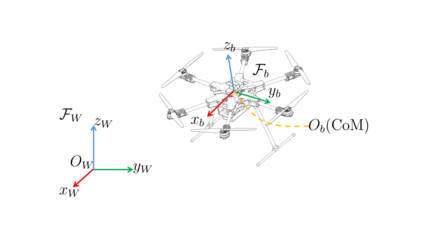
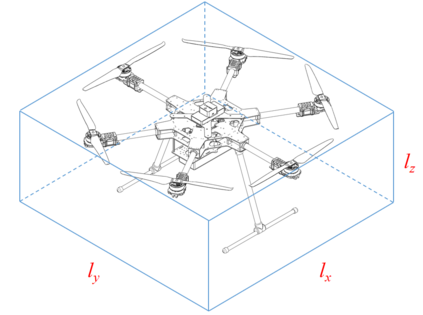
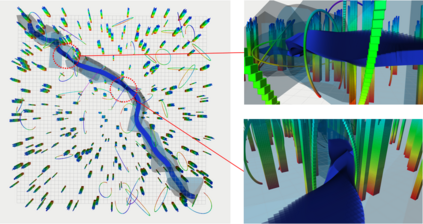
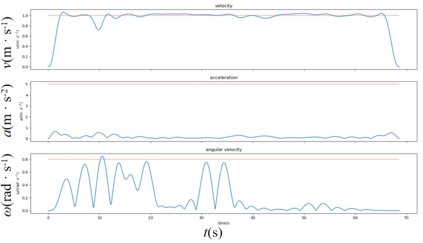
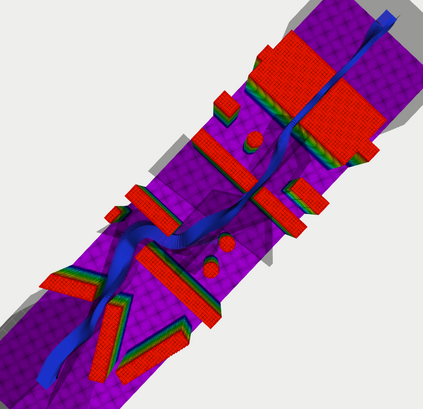
As a kind of fully actuated system, omnidirectional multirotor aerial vehicles (OMAVs) has more flexible maneuverability than traditional underactuated multirotor aircraft, and it also has more significant advantages in obstacle avoidance flight in complex environments.However, there is almost no way to generate the full degrees of freedom trajectory that can play the OMAVs' potential.Due to the high dimensionality of configuration space, it is challenging to make the designed trajectory generation algorithm efficient and scalable.This paper aims to achieve obstacle avoidance planning of OMAV in complex environments. A 6-DoF trajectory generation framework for OMAVs was designed for the first time based on the geometrically constrained Minimum Control Effort (MINCO) trajectory generation framework.According to the safe regions represented by a series of convex polyhedra, combined with the aircraft's overall shape and dynamic constraints, the framework finally generates a collision-free optimal 6-DoF trajectory.The vehicle's attitude is parameterized into a 3D vector by stereographic projection.Simulation experiments based on Gazebo and PX4 Autopilot are conducted to verify the performance of the proposed framework.
翻译:作为完全振动的系统,全向多色飞行器(OMAVs)比传统的低活性多色飞行器(OMAVs)具有更灵活的机动性,比传统的低活性多色飞行器(OMAVs)具有更灵活的机动性,而且在复杂环境中阻碍避免飞行方面也具有更大的优势。然而,几乎没有办法产生能够发挥OMAV潜力的完整自由轨道。由于配置空间的高度维度,使得设计轨迹生成算法的效率和可缩放性具有挑战性。 本文的目的是在复杂环境中实现对OMA的避免障碍规划。 OMAVs的6-DoF轨迹生成框架是首次根据几何限制的最低控制 Efffort(MINCO)轨迹生成框架设计出来的。 根据一系列 convex 聚体组成的安全区域,加上飞机的总体形状和动态限制,该框架最终产生了一个无碰撞最佳的6-DoF轨迹。 该飞行器的姿态通过遥测投图将3D矢量测量成3D矢量。 以Gazos4和PX模拟框架为基础,进行了自动测试。