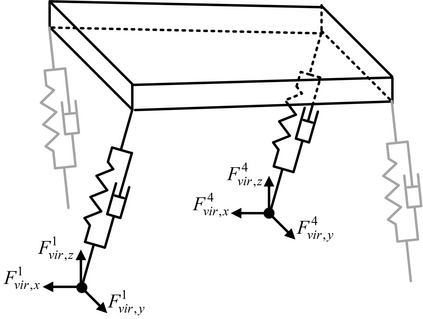
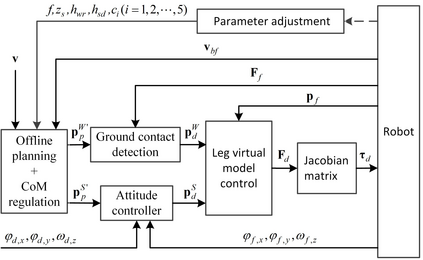
An intuitive control method for the flying trot, which combines offline trajectory planning with real-time balance control, is presented. The motion features of running animals in the vertical direction were analysed using the spring-load-inverted-pendulum (SLIP) model, and the foot trajectory of the robot was planned, so the robot could run similar to an animal capable of vertical flight, according to the given height and speed of the trunk. To improve the robustness of running, a posture control method based on a foot acceleration adjustment is proposed. A novel kinematic based CoM observation method and CoM regulation method is present to enhance the stability of locomotion. To reduce the impact force when the robot interacts with the environment, the virtual model control method is used in the control of the foot trajectory to achieve active compliance. By selecting the proper parameters for the virtual model, the oscillation motion of the virtual model and the planning motion of the support foot are synchronized to avoid the large disturbance caused by the oscillation motion of the virtual model in relation to the robot motion. The simulation and experiment using the quadruped robot Billy are reported. In the experiment, the maximum speed of the robot could reach 4.73 times the body length per second, which verified the feasibility of the control method.
翻译:展示了将离线轨迹规划与实时平衡控制相结合的飞行轨迹直觉控制方法。在垂直方向运行动物的动作特征是使用弹簧-负旋转弹道模型(SLIP)分析的,并计划了机器人的脚轨线,这样机器人可以运行与能够垂直飞行的动物相似,这符合树干给定的高度和速度。为了提高运行的稳健性,提议了一个基于脚加速调整的姿势控制方法。现在有一种新的基于运动的COM观测方法和COM调控方法,以加强移动的稳定性。为了减少机器人与环境发生相互作用时的撞击力,在控制脚轨线时使用了虚拟模型控制方法,以实现积极合规。通过为虚拟模型选择适当的参数,虚拟模型的振动动作和辅助脚的规划动作是同步的,以避免虚拟模型的振动动作与机器人动作有关的大规模扰动。使用四振动机体运动的模拟和实验,每个机器人的机身控制速度报告,每个机器人的四振动控制速度。