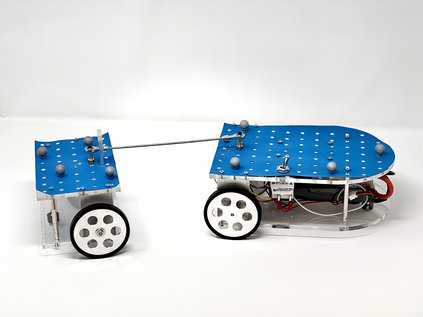
Non-holonomic vehicles are of immense practical value and increasingly subject to automation. However, controlling them accurately, e.g., when parking, is known to be challenging for automatic control methods, including model predictive control (MPC). Combining results from MPC theory and sub-Riemannian geometry in the form of homogeneous nilpotent system approximations, this paper proposes a comprehensive, ready-to-apply design procedure for MPC controllers to steer controllable, driftless non-holonomic vehicles into given setpoints. It can be ascertained that the resulting controllers nominally asymptotically stabilize the setpoint for a large-enough prediction horizon. The design procedure is exemplarily applied to four vehicles, including the kinematic car and a differentially driven mobile robot with up to two trailers. The controllers use a non-quadratic cost function tailored to the non-holonomic kinematics. Novelly, for the considered example vehicles, it is proven that a quadratic cost employed in an otherwise similar controller is insufficient to reliably asymptotically stabilize the closed loop. Since quadratic costs are the conventional choice in control, this highlights the relevance of the findings. To the knowledge of the authors, it is the first time that MPC controllers of the proposed structure are applied to non-holonomic vehicles beyond very simple ones, in particular (partly) on hardware.
翻译:非蛋白质组车辆具有巨大的实际价值,而且日益需要自动化。然而,精确地控制这些车辆,例如,当停车时,已知对自动控制方法,包括模型预测控制(MPC)具有挑战性。将MPC理论和亚里曼几何学的结果结合起来,以单一的零能力系统近似形式组合在一起,本文件建议对MPC控制器进行全面的、现成适用的设计程序,以引导可控的、无漂移的非蛋白质组车辆进入给定的定点。可以确定,由此产生的控制器在名义上暂时稳定大范围预测前景的设定点。设计程序对四部车辆,包括动动动汽车和有差异驱动的移动机器人,以两辆拖车为主。控制器使用一种非碱性的成本功能,适合非蛋白质组的运动运动运动。对于所考虑的车辆,可以证明,在一个类似控制器中,在其它类似的控制器中使用的二次成本在名义上,不足以可靠地固定地稳定地稳定常规循环的硬度结构。