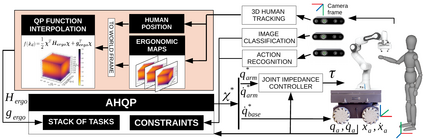
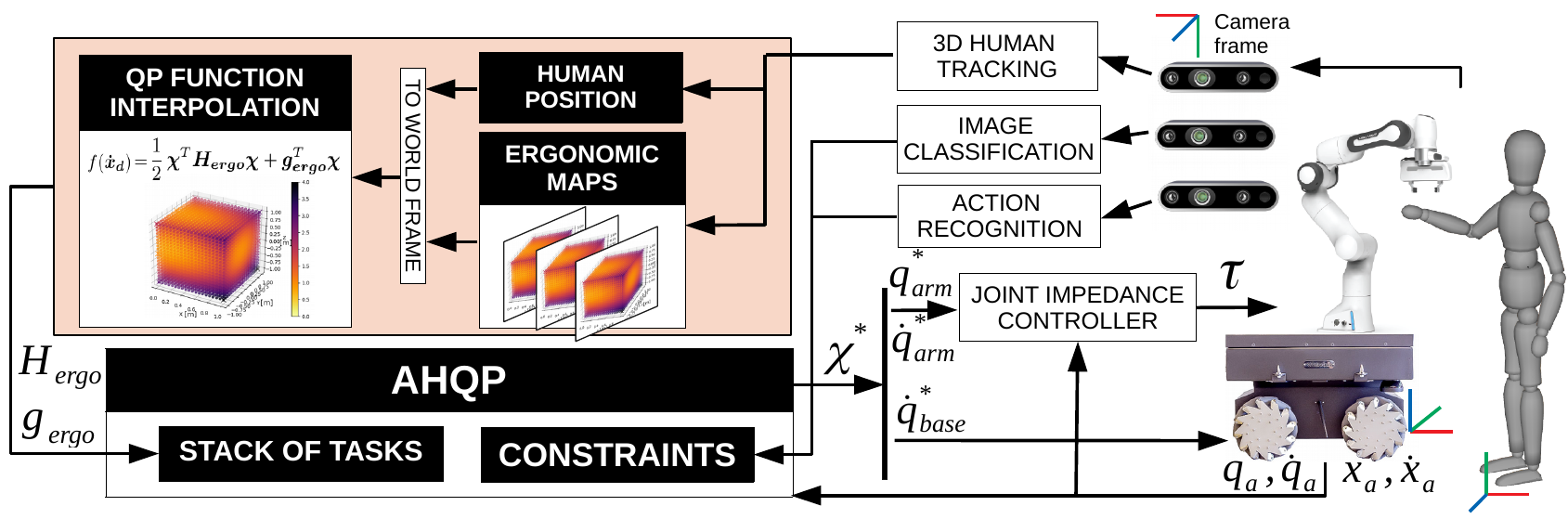
The recognition of actions performed by humans and the anticipation of their intentions are important enablers to yield sociable and successful collaboration in human-robot teams. Meanwhile, robots should have the capacity to deal with multiple objectives and constraints, arising from the collaborative task or the human. In this regard, we propose vision techniques to perform human action recognition and image classification, which are integrated into an Augmented Hierarchical Quadratic Programming (AHQP) scheme to hierarchically optimize the robot's reactive behavior and human ergonomics. The proposed framework allows one to intuitively command the robot in space while a task is being executed. The experiments confirm increased human ergonomics and usability, which are fundamental parameters for reducing musculoskeletal diseases and increasing trust in automation.
翻译:对人类行动的认识和对其意图的预期,是促成人类机器人团队成功合作的重要推动因素。 同时,机器人应有能力应对合作任务或人类产生的多重目标和制约因素。在这方面,我们提出开展人类行动认知和图像分类的视觉技术,这些技术被纳入一个强化的等级分级二次曲线方案(AHQP)计划,以按等级优化机器人的反应行为和人类人文工程学。拟议框架允许一个人在执行任务时直觉地指挥空间机器人。实验证实人类的人体工程学和可用性得到了提高,这是减少肌肉骨骼疾病和增强对自动化信任的基本参数。