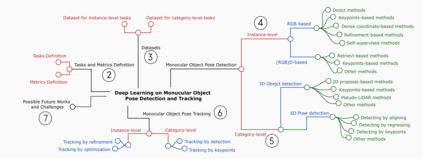
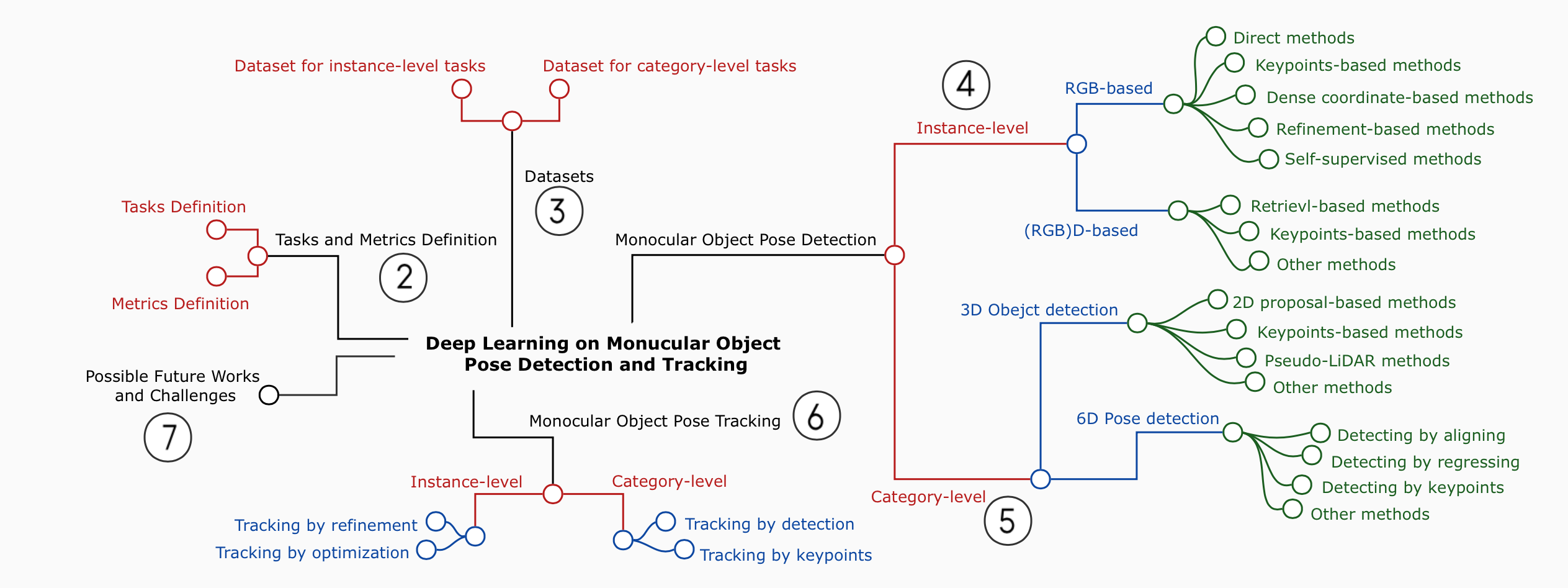
Object pose detection and tracking has recently attracted increasing attention due to its wide applications in many areas, such as autonomous driving, robotics, and augmented reality. Among methods for object pose detection and tracking, deep learning is the most promising one that has shown better performance than others. However, survey study about the latest development of deep learning-based methods is lacking. Therefore, this study presents a comprehensive review of recent progress in object pose detection and tracking that belongs to the deep learning technical route. To achieve a more thorough introduction, the scope of this study is limited to methods taking monocular RGB/RGBD data as input and covering three kinds of major tasks: instance-level monocular object pose detection, category-level monocular object pose detection, and monocular object pose tracking. In our work, metrics, datasets, and methods of both detection and tracking are presented in detail. Comparative results of current state-of-the-art methods on several publicly available datasets are also presented, together with insightful observations and inspiring future research directions.
翻译:最近,由于物体的探测和跟踪在许多领域,例如自主驱动、机器人和增强现实等广泛应用,最近引起越来越多的注意。物体的探测和跟踪方法中,深层次学习是最有希望的,其表现优于其他方面。然而,关于深层次学习方法最新发展情况的调查研究仍然缺乏。因此,本研究报告对物体的探测和跟踪最新进展进行了全面审查,这种进展属于深层学习技术途径。为了更彻底的介绍,本研究报告的范围限于将单项RGB/RGBBD数据作为投入并涵盖三种主要任务的方法:如单项单项单项单项物体构成探测、类别级单项物体显示探测、单项物体构成跟踪。在我们的工作中,还详细介绍了有关探测和跟踪的计量、数据集和方法。还介绍了关于若干公开数据集的当前最新方法的比较结果,同时提出了深刻的观察和令人鼓舞的未来研究方向。