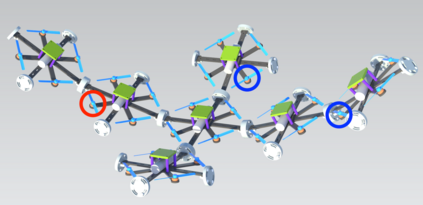
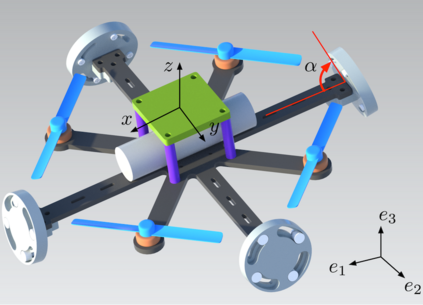
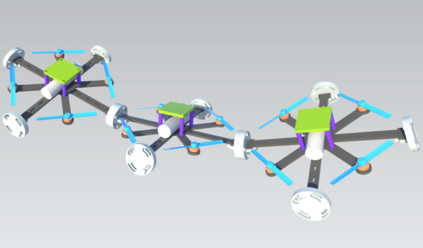
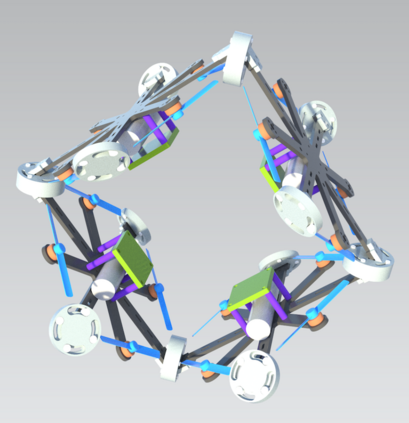
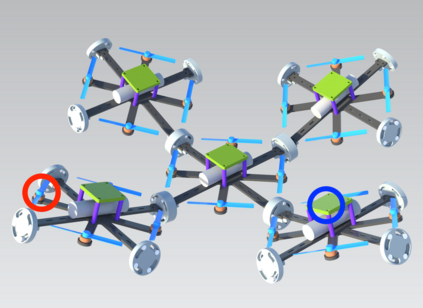
The standard quadrotor is one of the most popular and widely used aerial vehicle of recent decades, offering great maneuverability with mechanical simplicity. However, the under-actuation characteristic limits its applications, especially when it comes to generating desired wrench with six degrees of freedom (DOF). Therefore, existing work often compromises between mechanical complexity and the controllable DOF of the aerial system. To take advantage of the mechanical simplicity of a standard quadrotor, we propose a modular aerial system, IdentiQuad, that combines only homogeneous quadrotor-based modules. Each IdentiQuad can be operated alone like a standard quadrotor, but at the same time allows task-specific assembly, increasing the controllable DOF of the system. Each module is interchangeable within its assembly. We also propose a general controller for different configurations of assemblies, capable of tolerating rotor failures and balancing the energy consumption of each module. The functionality and robustness of the system and its controller are validated using physics-based simulations for different assembly configurations.
翻译:暂无翻译