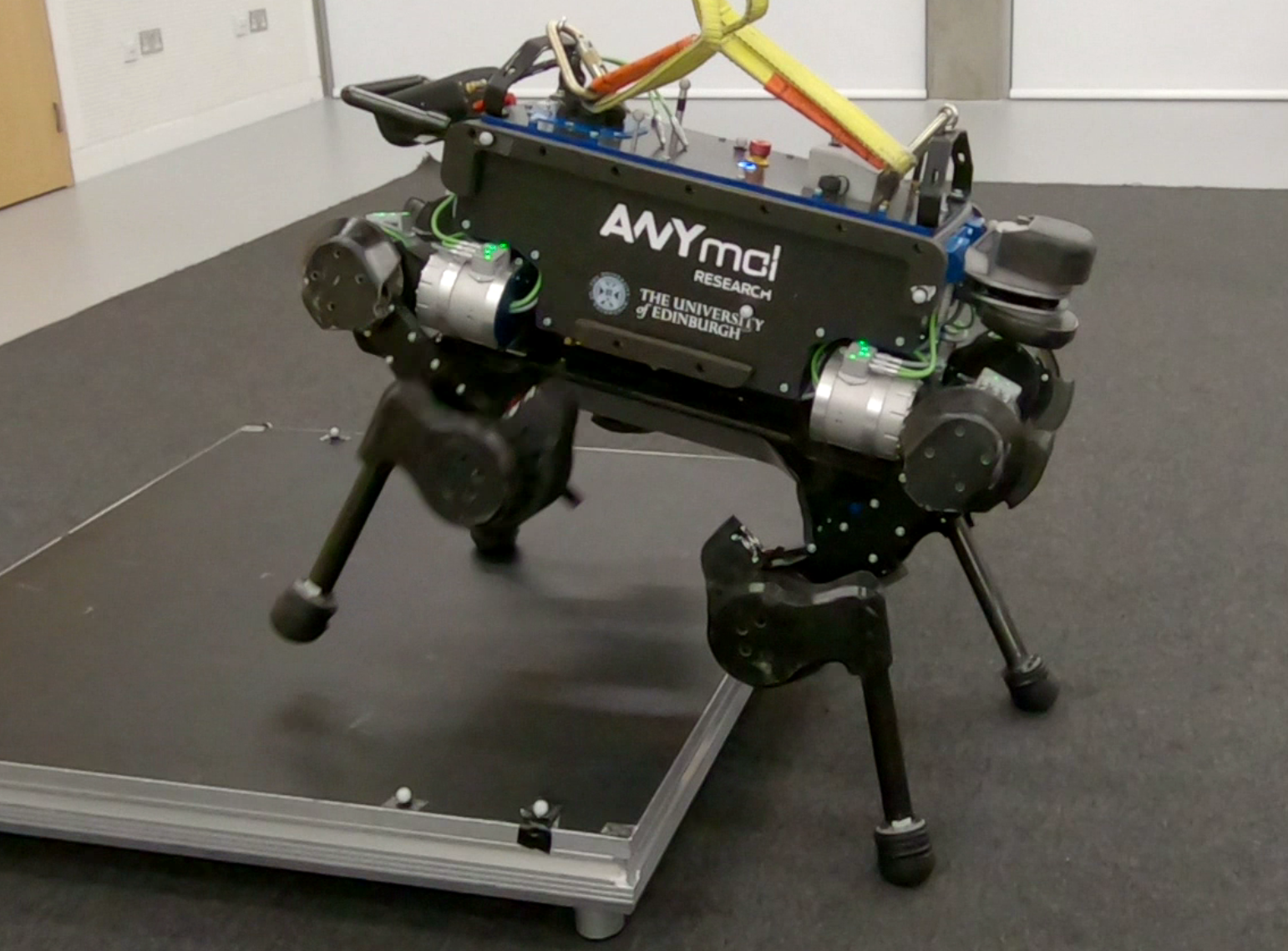
Legged robot locomotion requires the planning of stable reference trajectories, especially while traversing uneven terrain. The proposed trajectory optimization framework is capable of generating dynamically stable base and footstep trajectories for multiple steps. The locomotion task can be defined with contact locations, base motion or both, making the algorithm suitable for multiple scenarios (e.g., presence of moving obstacles). The planner uses a simplified momentum-based task space model for the robot dynamics, allowing computation times that are fast enough for online replanning.This fast planning capabilitiy also enables the quadruped to accommodate for drift and environmental changes. The algorithm is tested on simulation and a real robot across multiple scenarios, which includes uneven terrain, stairs and moving obstacles. The results show that the planner is capable of generating stable trajectories in the real robot even when a box of 15 cm height is placed in front of its path at the last moment.
翻译:腿式机器人移动需要规划稳定的参考轨迹, 特别是在穿越不均的地形时。 拟议的轨迹优化框架能够产生动态稳定的基脚轨迹, 并产生多个步骤。 移动任务可以用接触点、 基脚动作或两者都来定义, 使算法适合多种情景( 例如移动障碍的存在 ) 。 计划者对机器人动态使用一个简化的基于动力的工作空间模型, 允许计算时间足够快, 以便进行在线再规划 。 这个快速规划稳定性还能让四重曲能够适应漂移和环境变化 。 算法是模拟测试的, 一个真正的机器人跨越多个场景, 其中包括不均匀的地形、 楼梯和移动障碍 。 结果显示, 计划者能够在真实机器人中生成稳定的轨迹, 即使15厘米高度的盒子在最后一刻被放置在路径前面 。