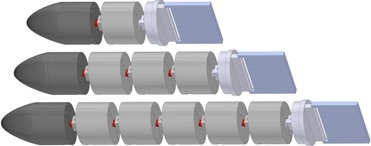
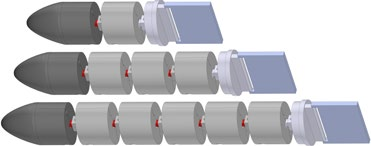
In this work we developed a mathematical model and a simulation platform for a fish-inspired robotic template, namely Magnetic, Modular, Undulatory Robotics ($\mu$Bots). Through this platform, we systematically explored the effects of design and fluid parameters on the swimming performance via reinforcement learning. The mathematical model was composed of two interacting subsystems, the robot dynamics and the hydrodynamics, and the hydrodynamic model consisted of reactive components (added-mass and pressure forces) and resistive components (drag and friction forces), which were then nondimensionalized for deriving key "control parameters" of robot-fluid interaction. The $\mu$Bot was actuated via magnetic actuators controlled with harmonic voltage signals, which were optimized via EM-based Policy Hyper Parameter Exploration (EPHE) to maximize swimming speed. By varying the control parameters, total 36 cases with different robot template variations (Number of Actuation (NoA) and stiffness) and hydrodynamic parameters were simulated and optimized via EPHE. Results showed that wavelength of optimized gaits (i.e., traveling wave along body) was independent of template variations and hydrodynamic parameters. Higher NoA yielded higher speed but lower speed per body length however with diminishing gain and lower speed per body length. Body and caudal-fin gait dynamics were dominated by the interaction among fluid added-mass, spring, and actuation torque, with negligible contribution from fluid resistive drag. In contrast, thrust generation was dominated by pressure force acting on caudal fin, as steady swimming resulted from a balance between resistive force and pressure force, with minor contributions from added-mass and body drag forces. Therefore, added-mass force only indirectly affected the thrust generation and swimming speed via the caudal fin dynamics.
翻译:在这项工作中,我们开发了一个数学模型和一个模拟平台,用于由鱼类启发的机器人模版,即磁性、摩尔性、不循环机器人模版($mu$Bots ) 。通过这个平台,我们系统地探索了设计和流体参数通过强化学习对游泳性能的影响。数学模型由两个互动的子系统、机器人动态和流体动力组成,而流体动力模型则由反应性部件(增加质量和压力力)和阻力(拉力和摩擦力)组成,这些部件后来被非维化,用于得出机器人与液流体互动的关键“控制参数 ” 。 美元穆尔式通过以调调调电信号控制磁振动器对游泳性效果的影响。 数学模型通过基于EM的政策超光度探索(EPHE)优化了设计与流体性运动力效果。 不同的控制参数,共有36个机器人模组(动作和坚硬力增加值)以及水力动力参数通过EPHE模拟和优化。 研究结果显示,从硬性电流动力动力动力和不断变压(ireal-ral-de-deal-deal demodal demodal demode) ex ex ex ex ex ex ex ex exlate exlate) ex exlate exlate ex ex ex ex ex exlate ex ex ex ex ex by suder by suder suder suder suder by by suder suder superal ex ex ex ex ex superal superal superal superal super superal superal superal superal superal superal dal superal exal dal dal exal suder superal superaldal daldal dal dal dal sual sual superal dal suder ex be be be be be suder ex. exal superal super exal super super super 和 和 superal ex