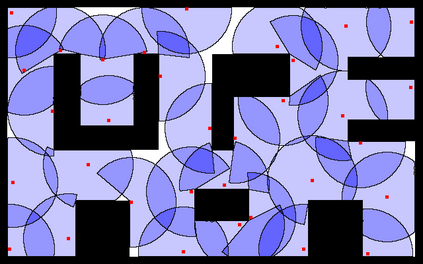
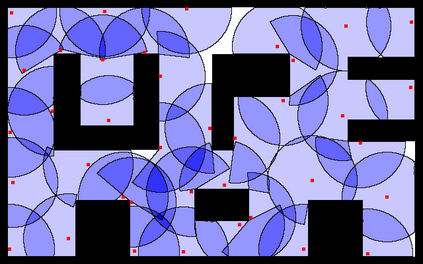
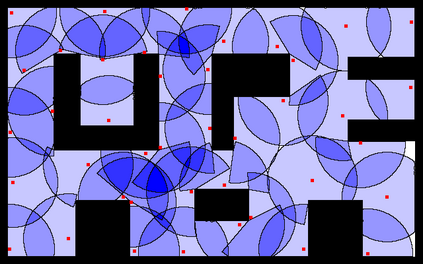
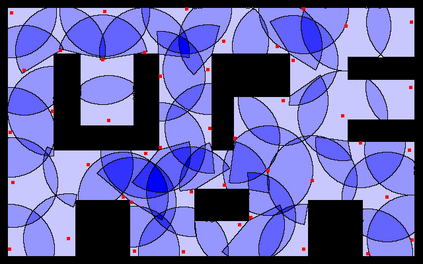
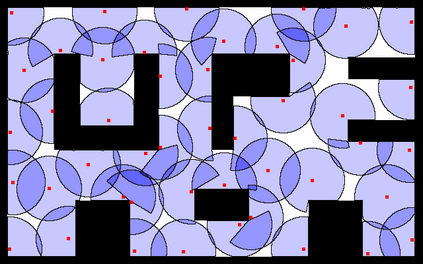
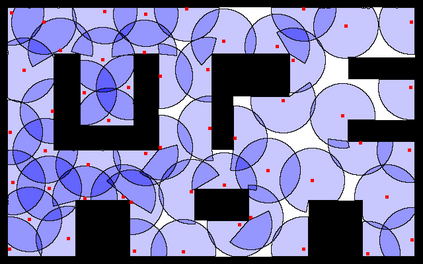
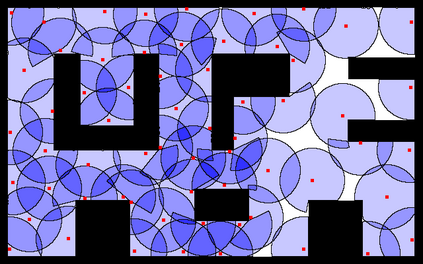
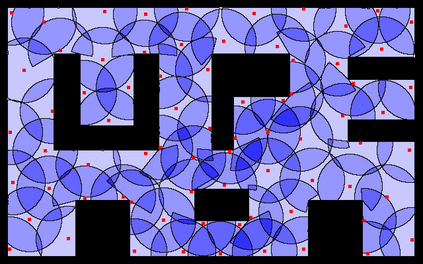
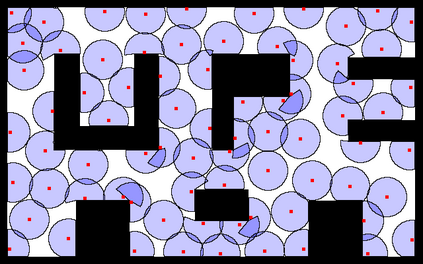
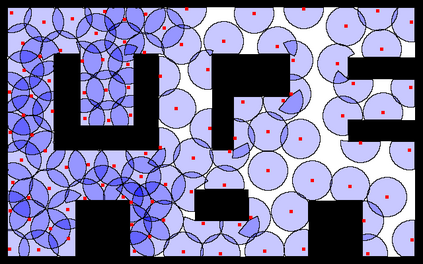
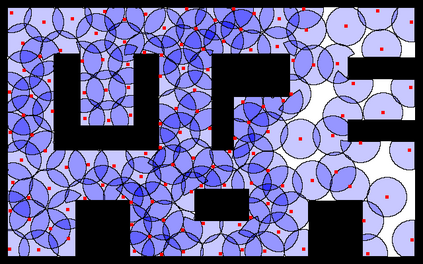
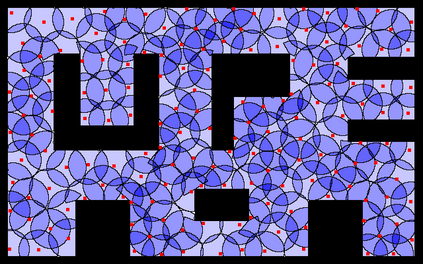
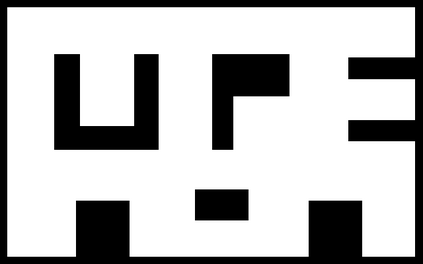
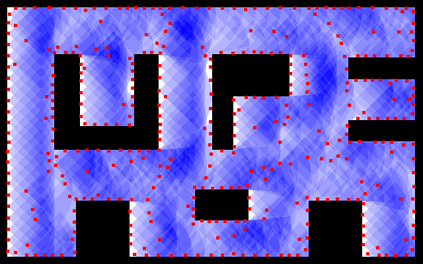
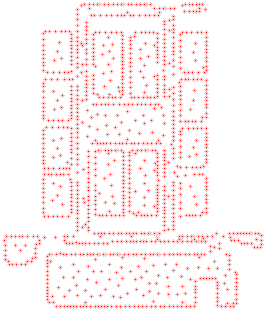
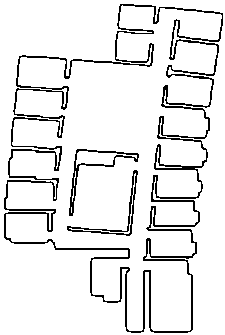
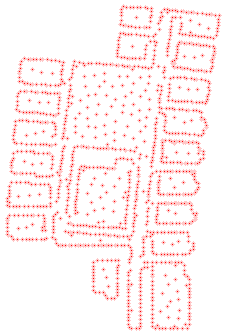
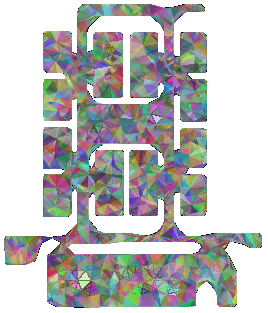
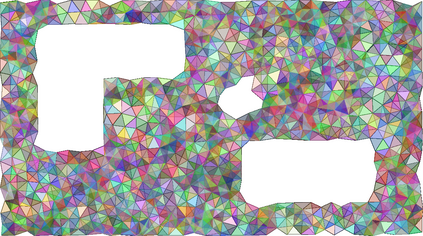
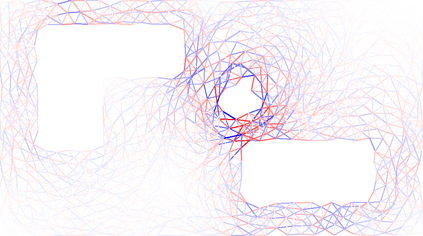
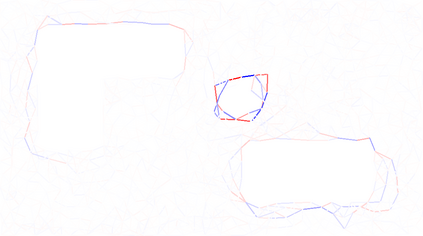
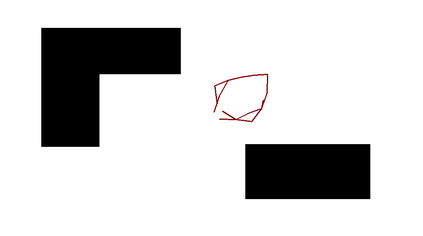
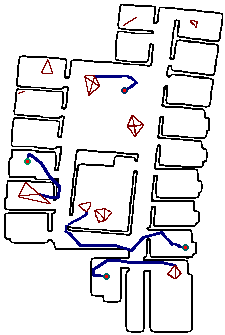
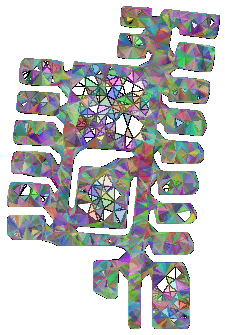
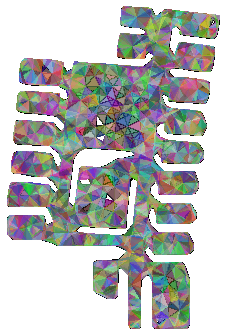
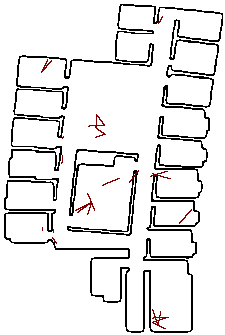
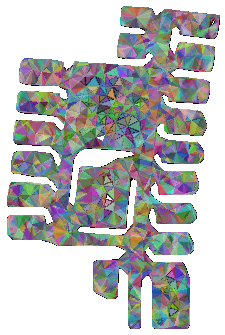
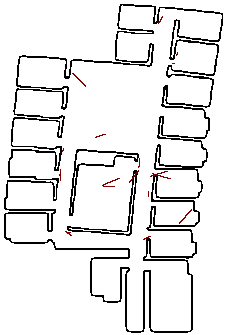
In this paper, we address the problem of autonomous multi-robot mapping, exploration and navigation in unknown, GPS-denied indoor or urban environments using a swarm of robots equipped with directional sensors with limited sensing capabilities and limited computational resources. The robots have no a priori knowledge of the environment and need to rapidly explore and construct a map in a distributed manner using existing landmarks, the presence of which can be detected using onboard senors, although little to no metric information (distance or bearing to the landmarks) is available. In order to correctly and effectively achieve this, the presence of a necessary density/distribution of landmarks is ensured by design of the urban/indoor environment. We thus address this problem in two phases: 1) During the design/construction of the urban/indoor environment we can ensure that sufficient landmarks are placed within the environment. To that end we develop a filtration-based approach for designing strategic placement of landmarks in an environment. 2) We develop a distributed algorithm using which a team of robots, with no a priori knowledge of the environment, can explore such an environment, construct a topological map requiring no metric/distance information, and use that map to navigate within the environment. This is achieved using a topological representation of the environment (called a Landmark Complex), instead of constructing a complete metric/pixel map. The representation is built by the robot as well as used by them for navigation through a balance between exploration and exploitation. We use tools from homology theory for identifying "holes" in the coverage/exploration of the unknown environment and hence guiding the robots towards achieving a complete exploration and mapping of the environment.
翻译:在本文中,我们处理在未知的、GPS封闭的室内或城市环境中进行自主多机器人绘图、探测和导航的问题。为了正确和有效地实现这一目标,通过设计具有有限遥感能力和有限计算资源的定向传感器,确保存在必要的地标密度/分布。因此,我们分两个阶段处理这一问题:1)在设计/建造城市/室内环境期间,我们可确保环境内有足够的地标。为此,我们开发了一种过滤法,用于设计在环境中的战略地标定位。2)我们开发了一个分布式算法,一个机器人小组,不事先了解环境,可以探索这样一个环境的密度/地标分布。我们用一个完整的地标/内部环境来构建一个图表,用一个不甚清晰的勘探/距离来构建一个地图,而用一个数字/距离的地图来构建一个完整的环境。我们用一个数字/位置图来构建一个完整的环境,用一个数字/路标的地图来绘制一个完整的环境,用一个数字/路标的地图,用一个数字/路标来绘制一个地图,用一个数字/路标的地图来测量环境,用一个数字/路标来绘制。