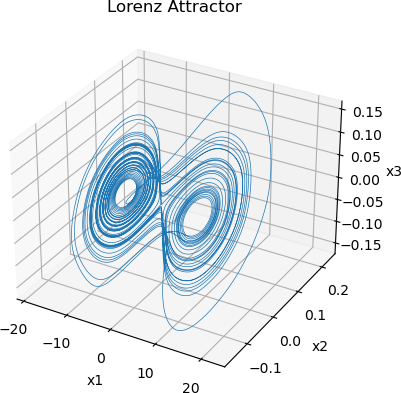
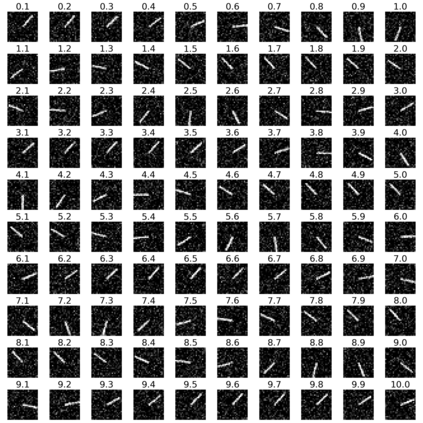
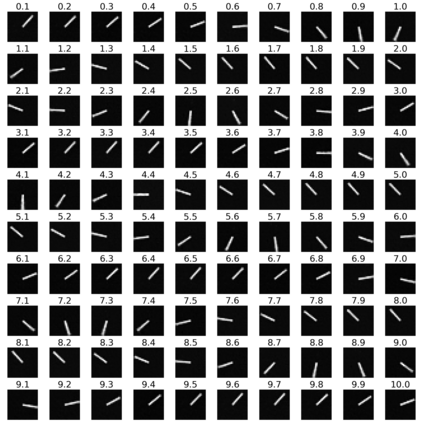
Modeling dynamical systems plays a crucial role in capturing and understanding complex physical phenomena. When physical models are not sufficiently accurate or hardly describable by analytical formulas, one can use generic function approximators such as neural networks to capture the system dynamics directly from sensor measurements. As for now, current methods to learn the parameters of these neural networks are highly sensitive to the inherent instability of most dynamical systems of interest, which in turn prevents the study of very long sequences. In this work, we introduce a generic and scalable method based on multiple shooting to learn latent representations of indirectly observed dynamical systems. We achieve state-of-the-art performances on systems observed directly from raw images. Further, we demonstrate that our method is robust to noisy measurements and can handle complex dynamical systems, such as chaotic ones.
翻译:建模动态系统在捕捉和理解复杂的物理现象方面发挥着关键作用。当物理模型不够准确或几乎无法被分析公式破除时,人们可以使用神经网络等通用功能近似器直接从传感器测量中捕捉系统动态。目前,了解这些神经网络参数的方法对大多数动态相关系统的内在不稳定性非常敏感,而这反过来又阻碍对非常长序列的研究。在这项工作中,我们采用了基于多次射击的通用和可扩展方法,以了解间接观测到的动态系统的潜在表现。我们在直接从原始图像观测到的系统上取得了最先进的性能。此外,我们证明我们的方法对噪音测量非常有力,能够处理复杂的动态系统,例如混乱的系统。