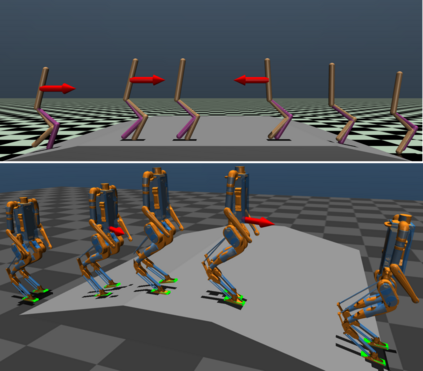
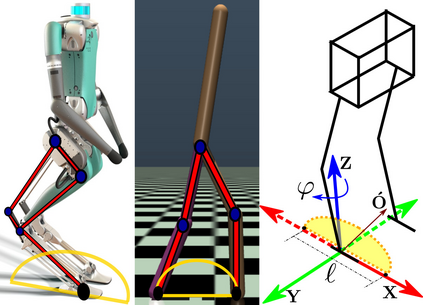
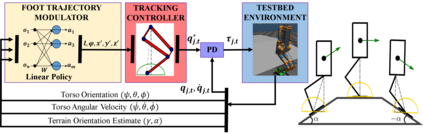
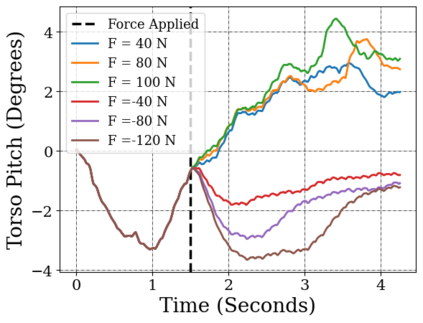
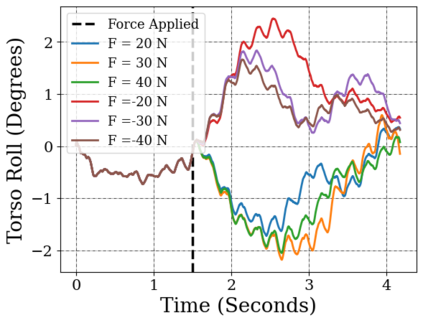
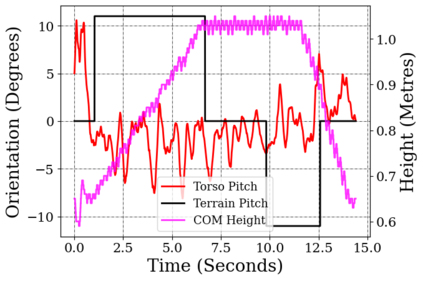
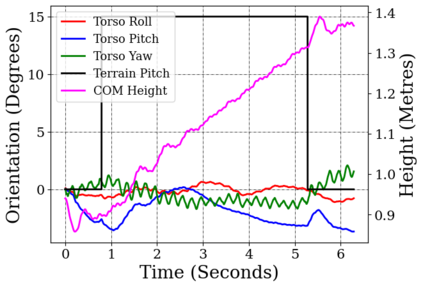
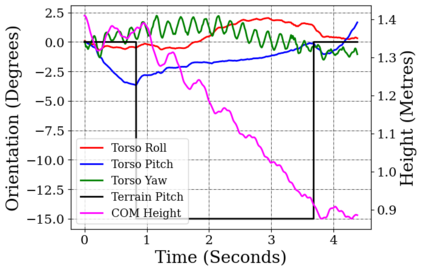
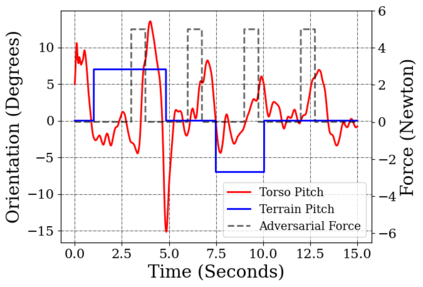
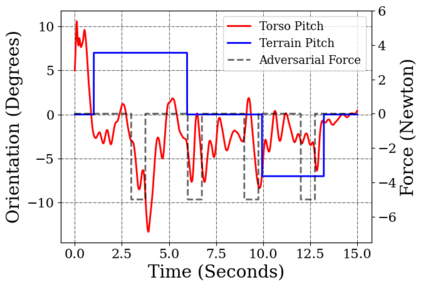
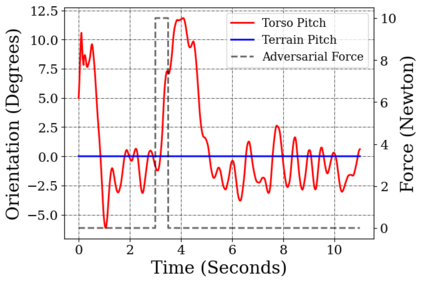
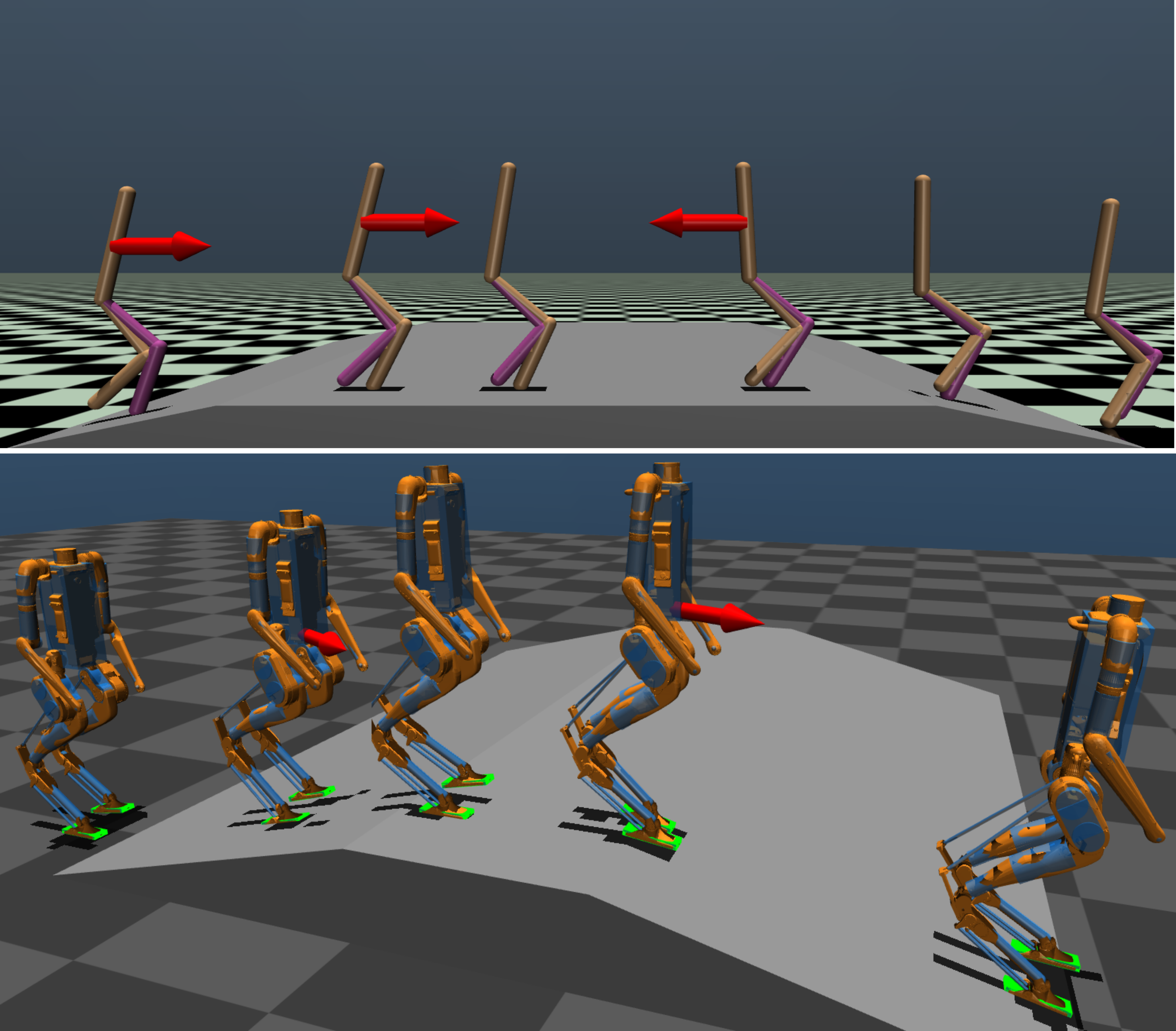
In this paper, with a view toward deployment of light-weight control frameworks for bipedal walking robots, we realize end-foot trajectories that are shaped by a single linear feedback policy. We learn this policy via a model-free and a gradient-free learning algorithm, Augmented Random Search (ARS), in the two robot platforms Rabbit and Digit. Our contributions are two-fold: a) By using torso and support plane orientation as inputs, we achieve robust walking on slopes of up to 20 degrees in simulation. b) We demonstrate additional behaviors like walking backwards, stepping-in-place, and recovery from external pushes of up to 120 N. The end result is a robust and a fast feedback control law for bipedal walking on terrains with varying slopes. Towards the end, we also provide preliminary results of hardware transfer to Digit.
翻译:在本文中,为了为双足行走的机器人部署轻量控制框架,我们实现了由单一线性反馈政策形成的末足轨迹。我们通过一个无模型和无梯度学习算法(ARS)在两个机器人平台Rabit和Digit中学习了这一政策。我们的贡献有两个方面:a)通过使用躯干和支持飞机定向作为投入,我们在模拟过程中在长达20度的斜坡上实现稳健的行走。b)我们展示了更多的行为,例如向后行、踏进和从高达120海里的外部推力中恢复。最终结果是为在不同斜坡的地形上双行行而制定了强有力和快速的反馈控制法。到最后,我们还提供了向Digit转移硬件的初步结果。