
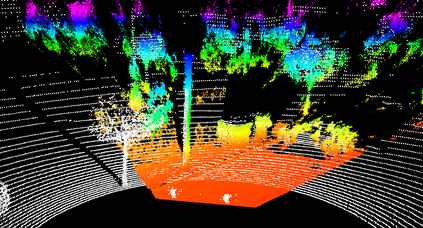
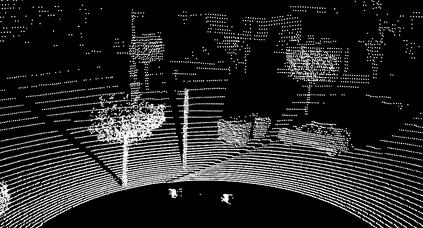
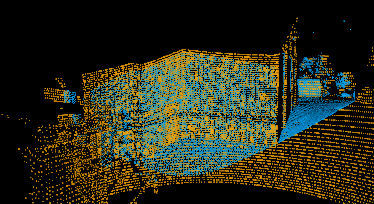
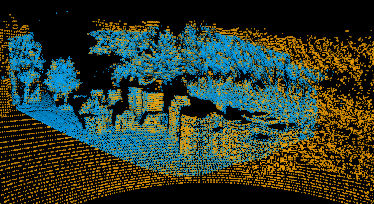
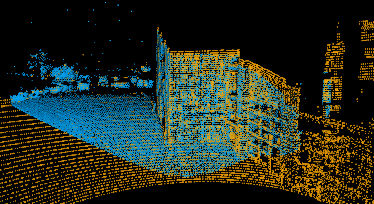
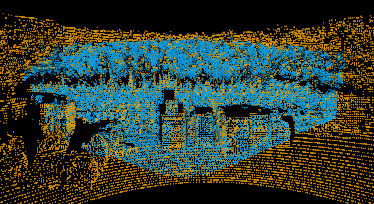
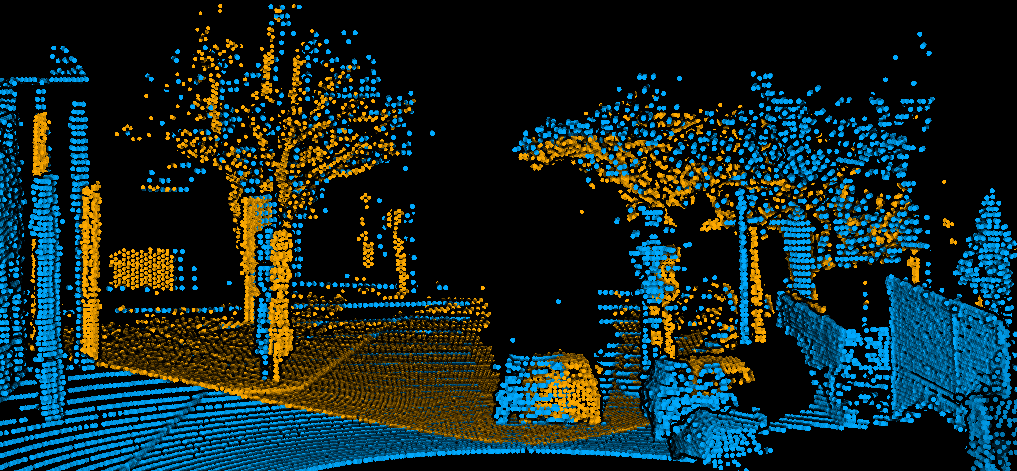
Mobile robotic applications need precise information about the geometric position of the individual sensors on the platform. This information is given by the extrinsic calibration parameters which define how the sensor is rotated and translated with respect to a fixed reference coordinate system. Erroneous calibration parameters have a negative impact on typical robotic estimation tasks, e.g. SLAM. In this work we propose a new method for a continuous estimation of the calibration parameters during operation of the robot. The parameter estimation is based on the matching of point clouds which are acquired by the sensors from multiple static viewpoints. Consequently, our method does not need any special calibration targets and is applicable to any sensor whose measurements can be converted to point clouds. We demonstrate the suitability of our method by calibrating a multi-sensor system composed by 2 lidar sensors, 3 cameras, and an imaging radar sensor.
翻译:移动机器人应用需要关于平台上各个传感器的几何位置的准确信息。 这些信息来自外部校准参数,该参数界定了传感器如何在固定参照坐标系统下旋转和翻译。 错误校准参数对典型的机器人估算任务,例如SLAM有负面影响。 在这项工作中,我们提出了在机器人运行期间持续估算校准参数的新方法。 参数估算基于传感器从多个静态角度获得的点云的匹配。 因此,我们的方法不需要任何特殊的校准目标,并且适用于测量可转换为点云的任何传感器。 我们通过校准由2里达传感器、3个相机和1个成像雷达传感器组成的多传感器系统,来证明我们的方法是否合适。






相关内容

Source: Apple - iOS 8


