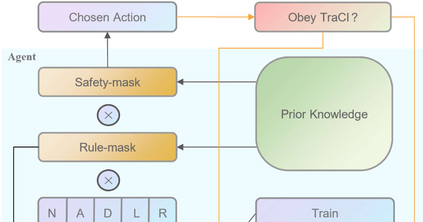
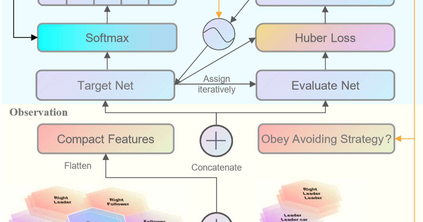
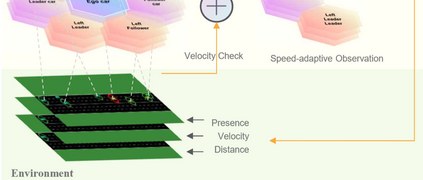
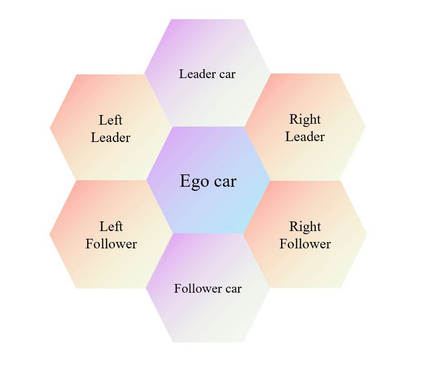
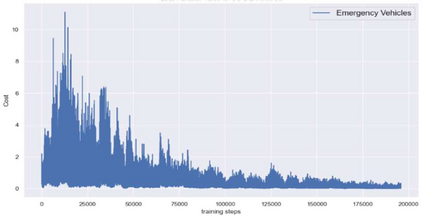
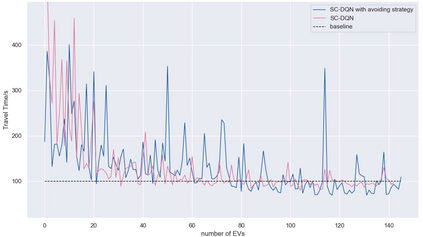
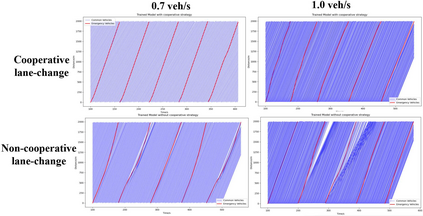
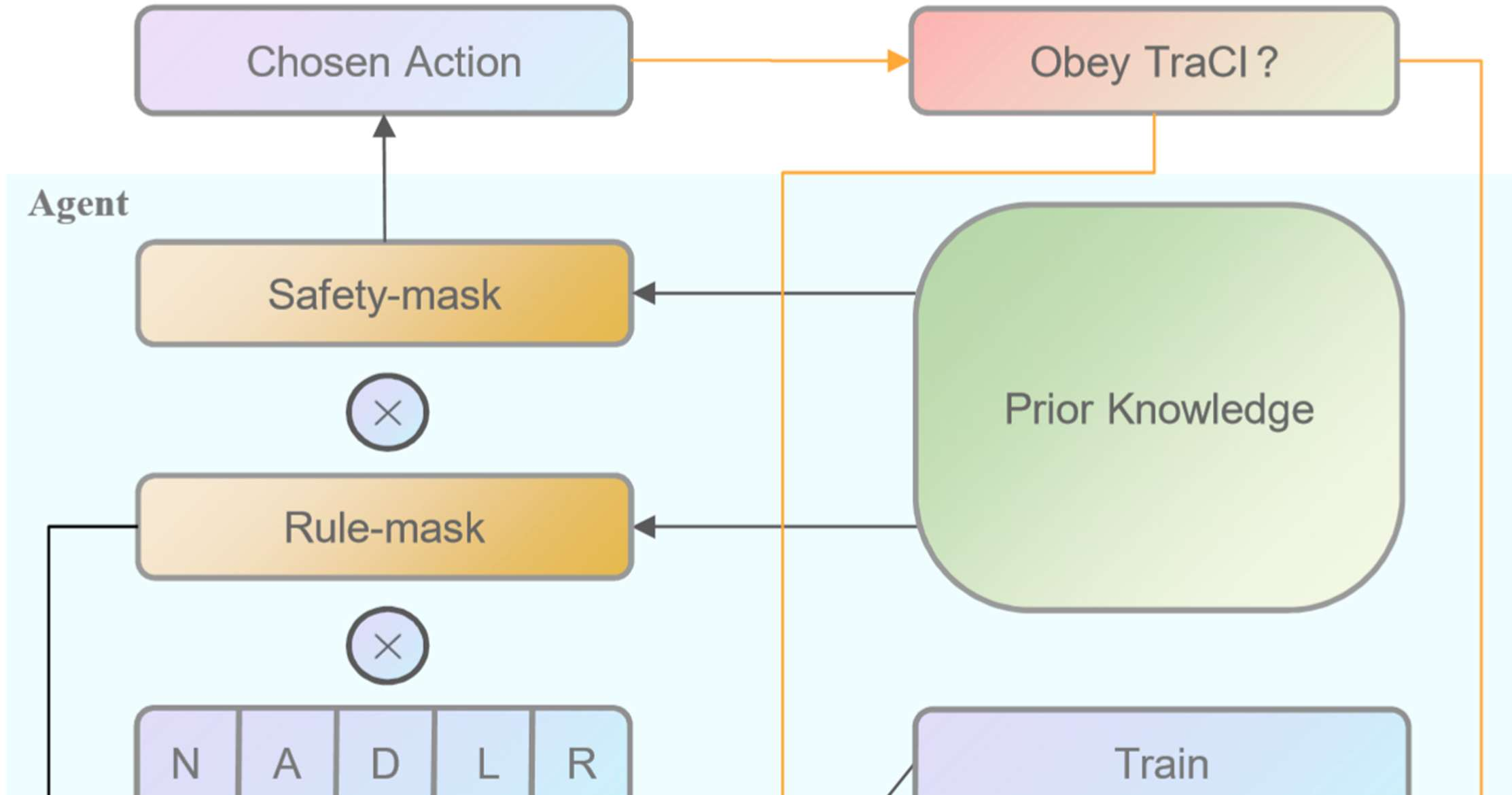
Increasing the response time of emergency vehicles(EVs) could lead to an immeasurable loss of property and life. On this account, tactical decision making for EVs' microscopic control remains an indispensable issue to be improved. In this paper, a rule-based avoiding strategy(AS) is devised, that CVs in the prioritized zone ahead of EV should accelerate or change their lane to avoid it. Besides, a novel DQN method with speed-adaptive compact state space (SC-DQN) is put forward to fit in EVs' high-speed feature and generalize in various road topologies. Afterward, the execution of AS feedback to the input of SC-DQN so that they joint organically as a combinational method. The following approach reveals that DRL could complement rule-based avoiding strategy in generalization, and on the contrary, the rule-based avoiding strategy could complement DRL in stability, and their combination could lead to less response time, lower collision rate and smoother trajectory.
翻译:增加应急车辆的反应时间可能导致无法估量的财产损失和生命损失。在这方面,关于EV微观控制的战术决策仍是一个不可或缺的问题,有待改进。在本文件中,制定了基于规则的避免战略(AS),在EV之前优先区的CV应加快或改变其航道以避免它发生。此外,提出了具有快速适应性紧凑国家空间(SC-DQN)的新型DQN方法,以适应EV的高速度特征,并概括各种道路地形。随后,对SC-DQN的投入实施AS反馈,以便它们有机地联合起来,作为混合方法。以下方法表明,DRL可以补充基于规则的避免战略,在普遍化方面,相反,基于规则的避免战略可以补充DRL的稳定,而它们的结合可以减少反应时间、降低碰撞率和滑动。