
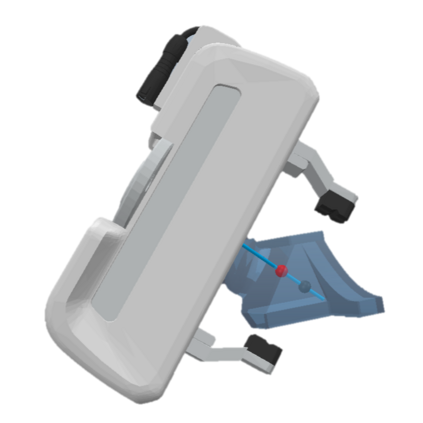
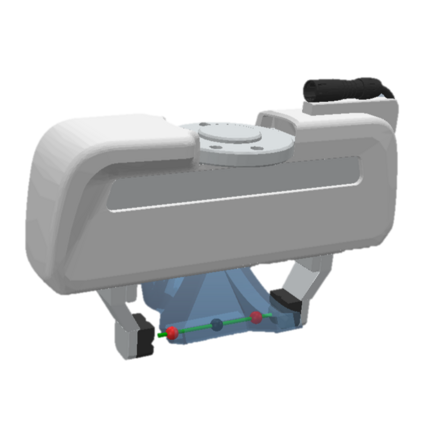
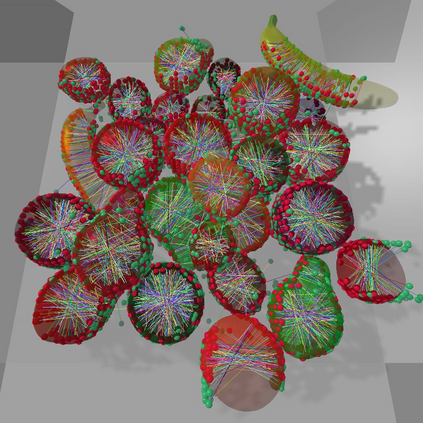
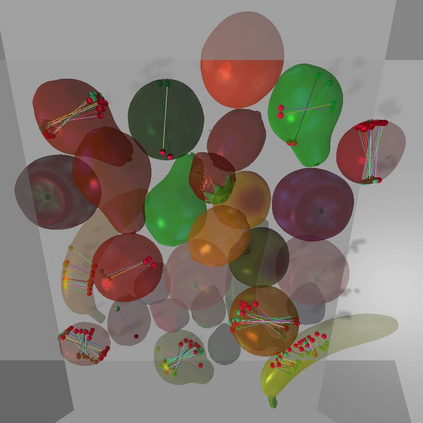
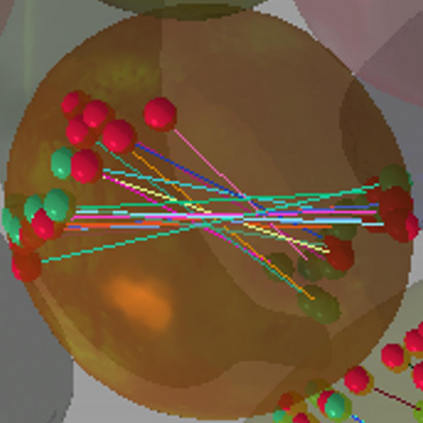
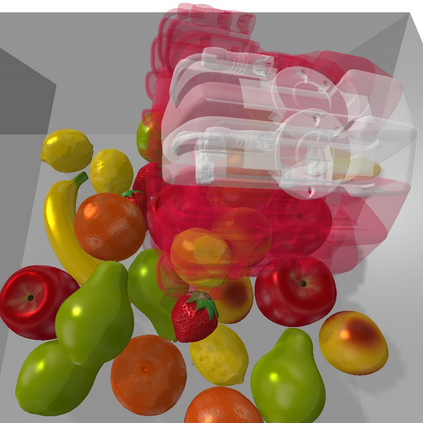
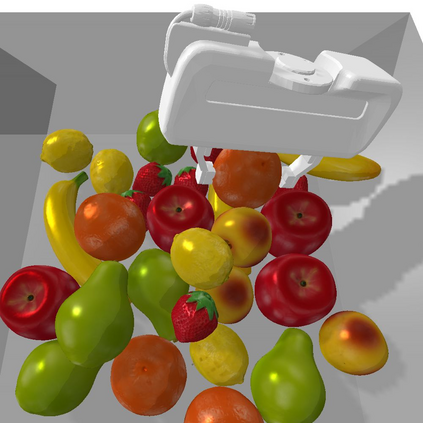
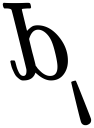
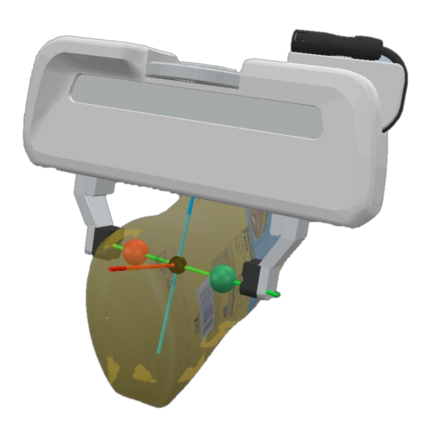
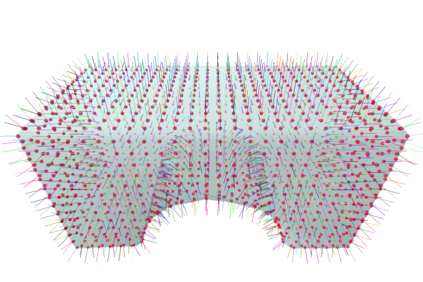
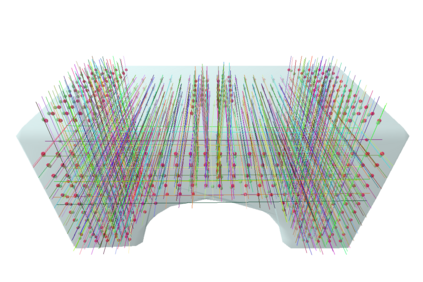
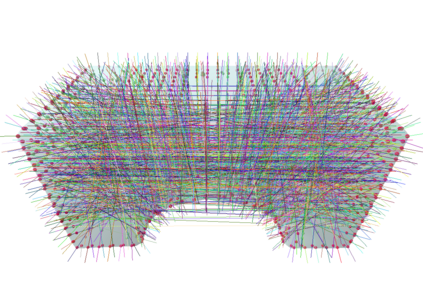
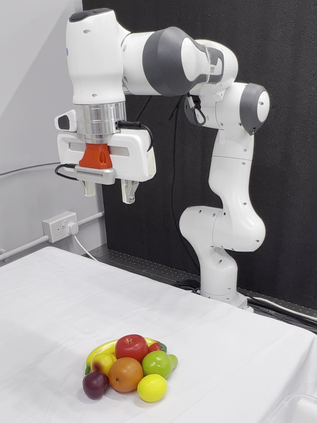
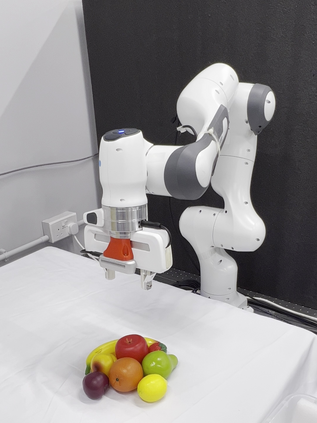
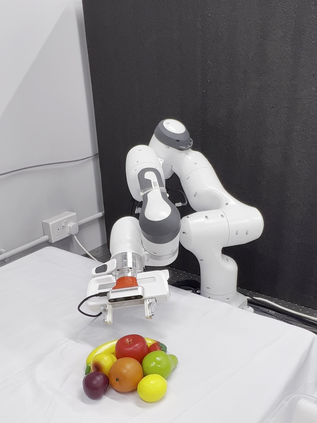
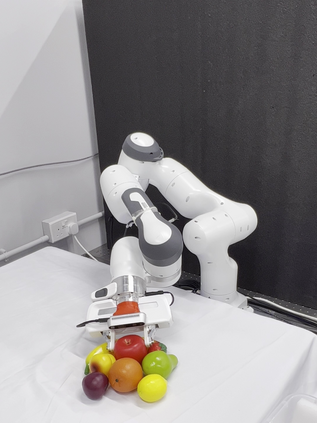
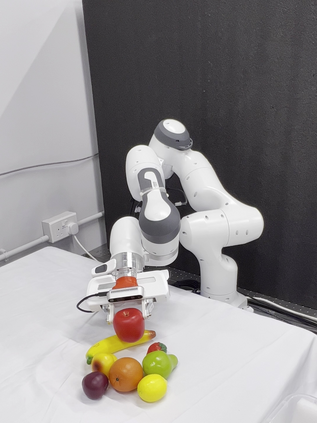
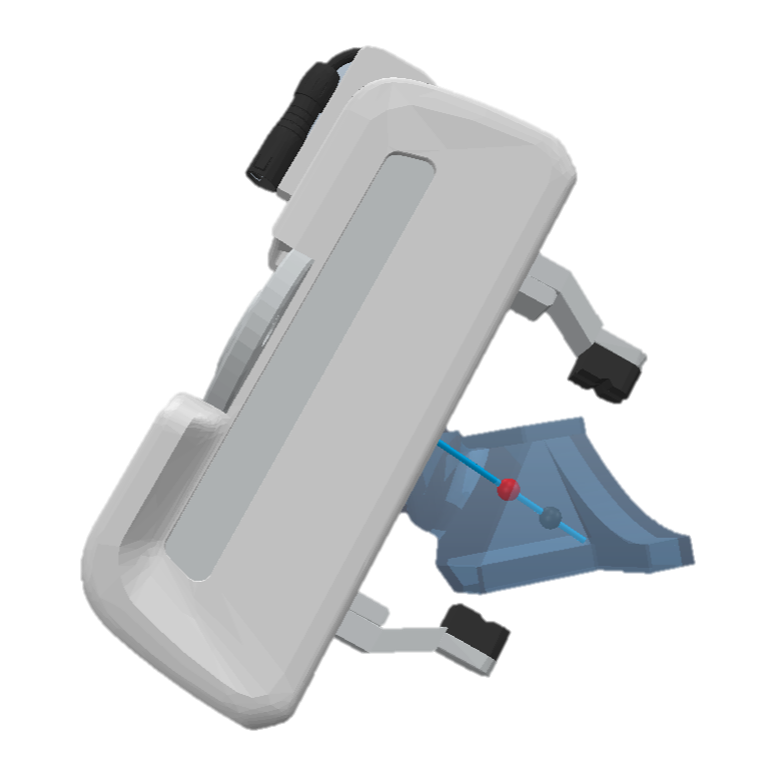
In this paper, we propose a novel grasp pipeline based on contact point detection on the truncated signed distance function (TSDF) volume to achieve closed-loop 7-degree-of-freedom (7-DoF) grasping on cluttered environments. The key aspects of our method are that 1) the proposed pipeline exploits the TSDF volume in terms of multi-view fusion, contact-point sampling and evaluation, and collision checking, which provides reliable and collision-free 7-DoF gripper poses with real-time performance; 2) the contact-based pose representation effectively eliminates the ambiguity introduced by the normal-based methods, which provides a more precise and flexible solution. Extensive simulated and real-robot experiments demonstrate that the proposed pipeline can select more antipodal and stable grasp poses and outperforms normal-based baselines in terms of the grasp success rate in both simulated and physical scenarios.
翻译:在本文中,我们建议建立一个新型的 " 抓住 " 管道,其基础是在短短的签字距离功能(TSDF)体积上的接触点探测,以实现7度自由(7度-DoF)封闭式循环7度自由(7度-DoF)捕捉环境,我们方法的关键方面是:1)拟议中的管道利用TSDF体积进行多视聚合、接触点取样和评估以及碰撞检查,这提供了可靠和无碰撞的7度-DoF牵引器的实时性能;2)基于接触的姿势代表有效地消除了正常方法带来的模糊性,而正常方法提供了更准确和灵活的解决方案。广泛模拟和真实的机器人实验表明,拟议的管道可以选择更多抗波体和稳定的抓力,在模拟和物理情景中,在掌握成功率方面超过正常基线。

















相关内容

- Today (iOS and OS X): widgets for the Today view of Notification Center
- Share (iOS and OS X): post content to web services or share content with others
- Actions (iOS and OS X): app extensions to view or manipulate inside another app
- Photo Editing (iOS): edit a photo or video in Apple's Photos app with extensions from a third-party apps
- Finder Sync (OS X): remote file storage in the Finder with support for Finder content annotation
- Storage Provider (iOS): an interface between files inside an app and other apps on a user's device
- Custom Keyboard (iOS): system-wide alternative keyboards
Source: iOS 8 Extensions: Apple’s Plan for a Powerful App Ecosystem


