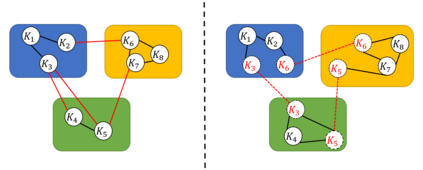
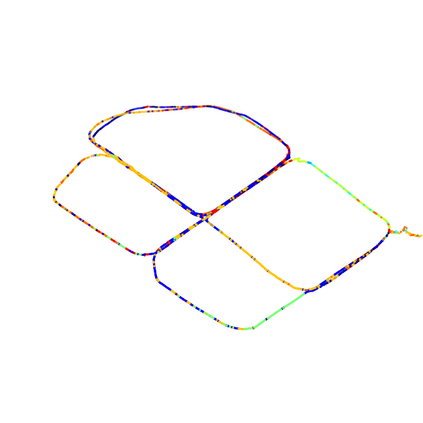
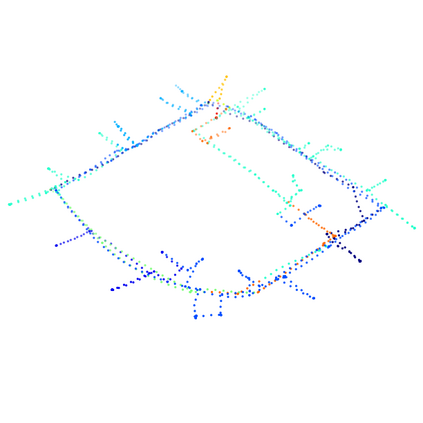
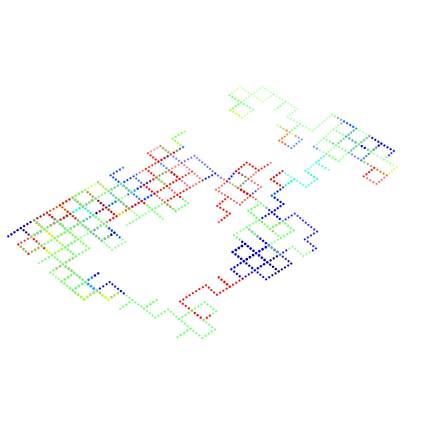
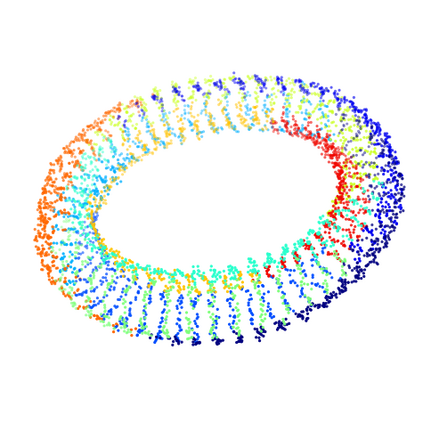
Distributed pose graph optimization (DPGO) is one of the fundamental techniques of swarm robotics. Currently, the sub-problems of DPGO are built on the native poses. Our validation proves that this approach may introduce an imbalance in the sizes of the sub-problems in real-world scenarios, which affects the speed of DPGO optimization, and potentially increases communication requirements. In addition, the coherence of the estimated poses is not guaranteed when the robots in the swarm fail, or partial robots are disconnected. In this paper, we propose BDPGO, a balanced distributed pose graph optimization framework using the idea of decoupling the robot poses and DPGO. BDPGO re-distributes the poses in the pose graph to the robot swarm in a balanced way by introducing a two-stage graph partitioning method to build balanced subproblems. Our validation demonstrates that BDPGO significantly improves the optimization speed without changing the specific algorithm of DPGO in realistic datasets. What's more, we also validate that BDPGO is robust to robot failure, changes in the wireless network. BDPGO has capable of keeps the coherence of the estimated poses in these situations. The framework also has the potential to be applied to other collaborative simultaneous localization and mapping (CSLAM) problems involved in distributedly solving the factor graph.
翻译:分布式图像优化(DPGO)是群装机器人的基本技术之一。目前,DPGO的次级问题以本地配置为基础。我们的论证证明,这种方法可能会在现实世界情景中造成子问题规模的不平衡,影响DPGO优化的速度,并有可能增加通信要求。此外,当群装机器人失灵或部分机器人断开时,估计面部的连贯性得不到保证。在本文中,我们提议BDPGO,一个平衡分布式图像优化框架,采用分离机器人配置和DPGO的理念。BDPGO通过引入两阶段图形分割法,以平衡的方式将配置图中的子问题向机器人暖流体的大小进行再分配。我们的验证表明,当群装机器人失灵或部分机器人断开时,估计面面部的稳定性速度将大大提高,同时不改变DPGO在现实数据集中的具体算法。此外,我们还确认,BDPGOGO对机器人的失败是稳健的,对无线网络的改变和DPGO的改变。BDPGO重新将配置图图图图像图的配置图像再均衡地分配。BDPGO 也能够使当地的地图配置成为了这些CSBDPGO的同步化框架。在本地配置中具有灵活性。