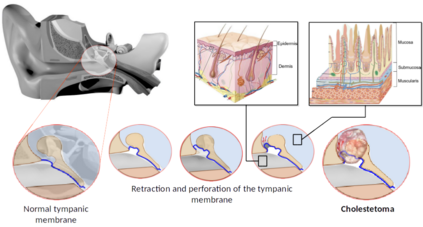
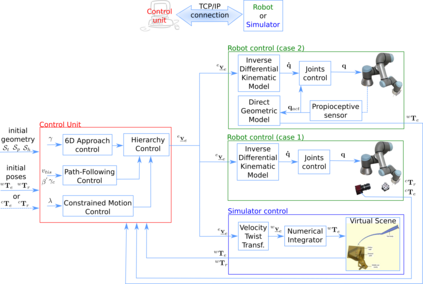
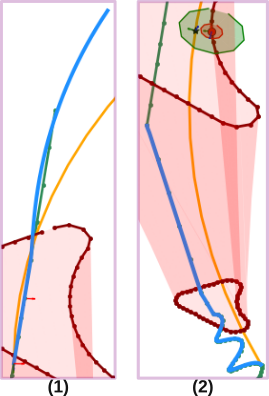
This article formulates a generic representation of a path-following controller operating under contained motion, which was developed in the context of surgical robotics. It reports two types of constrained motion: i) Bilateral Constrained Motion, also called Remote Center Motion (RCM), and ii) Unilaterally Constrained Motion (UCM). In the first case, the incision hole has almost the same diameter as the robotic tool. In contrast, in the second state, the diameter of the incision orifice is larger than the tool diameter. The second case offers more space where the surgical instrument moves freely without constraints before touching the incision wall. The proposed method combines two tasks that must operate hierarchically: i) respect the RCM or UCM constraints formulated by equality or inequality, respectively, and ii) perform a surgical assignment, e.g., scanning or ablation expressed as a 3D path-following task. The proposed methods and materials were tested first on our simulator that mimics realistic conditions of middle ear surgery, and then on an experimental platform. Different validation scenarios were carried out experimentally to assess quantitatively and qualitatively each developed approach. Although ultimate precision was not the goal of this work, our concept is validated with enough accuracy (inferior to 100 micrometres) for ear surgery.
翻译:文章对外科机器人外科手术的外科机器人外科外科手术中运行的行进控制器作了一般的描述。 它报告了两种类型的限制动作:(一) 双边约束动作,也称为远程中心运动(RCM),和(二) 单方面控制动作(UCM)。在第一个案例中,切口洞的直径几乎与机器人工具的直径相同。相比之下,在第二个状态下,切口或外孔的直径大于工具直径。第二个案例为外科手术器在触动切口墙之前不受限制地自由移动提供了更多空间。提议的方法将两种必须按等级操作的任务结合起来:(一) 尊重分别由平等或不平等形成的RCM或UCM限制,和(二) 执行外科手术任务,例如扫描或包缩成3D路径跟踪任务。提议的方法和材料先在模拟器上测试,这种模拟器模拟中耳科手术的现实条件,然后在实验平台上进行。不同的验证设想方案是实验性地进行,但最终和定性方法是评估的精度。