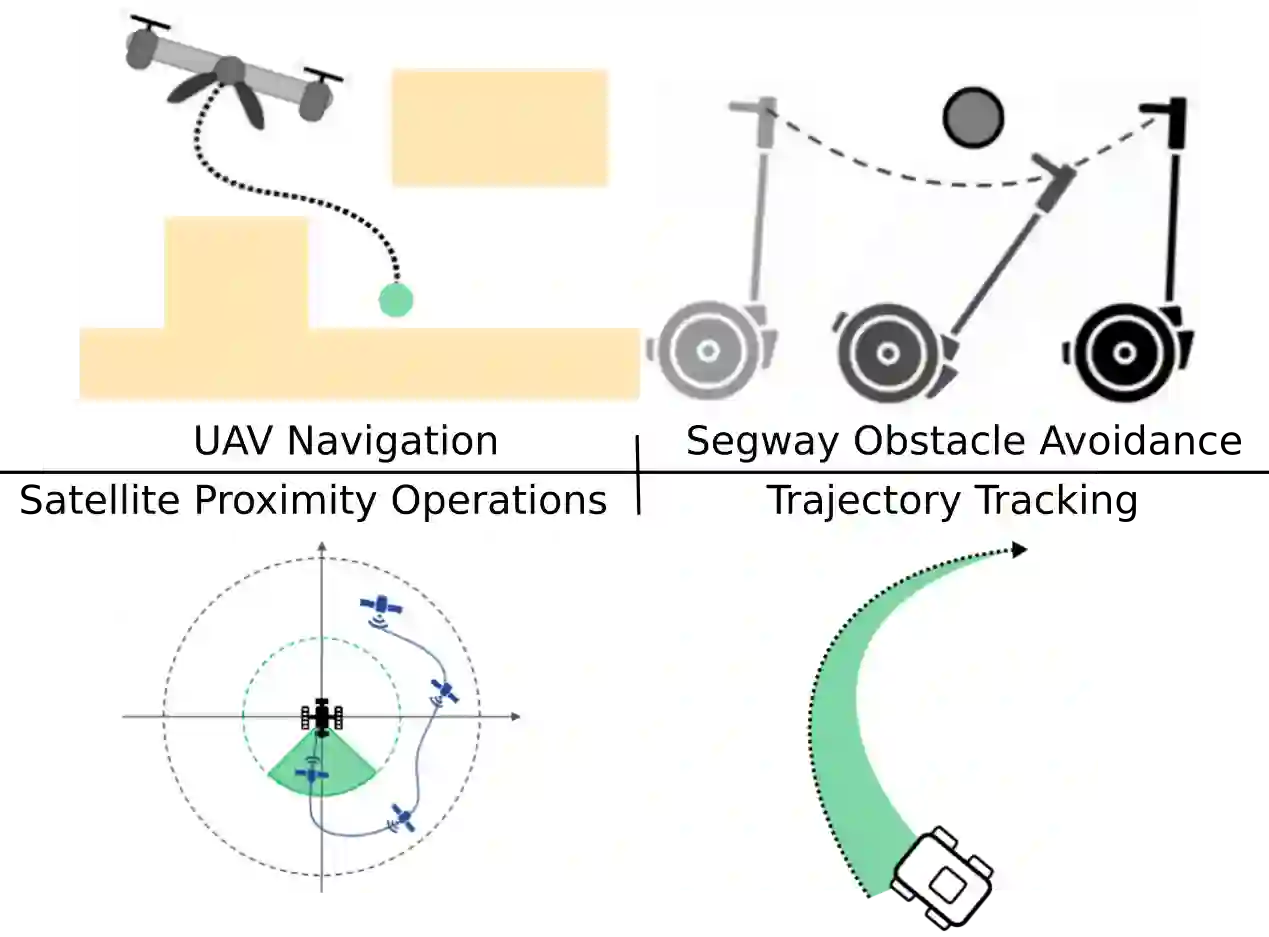
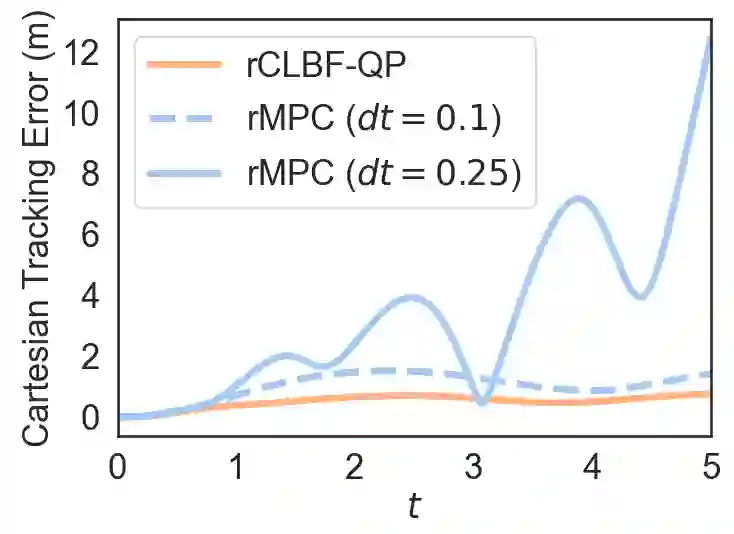
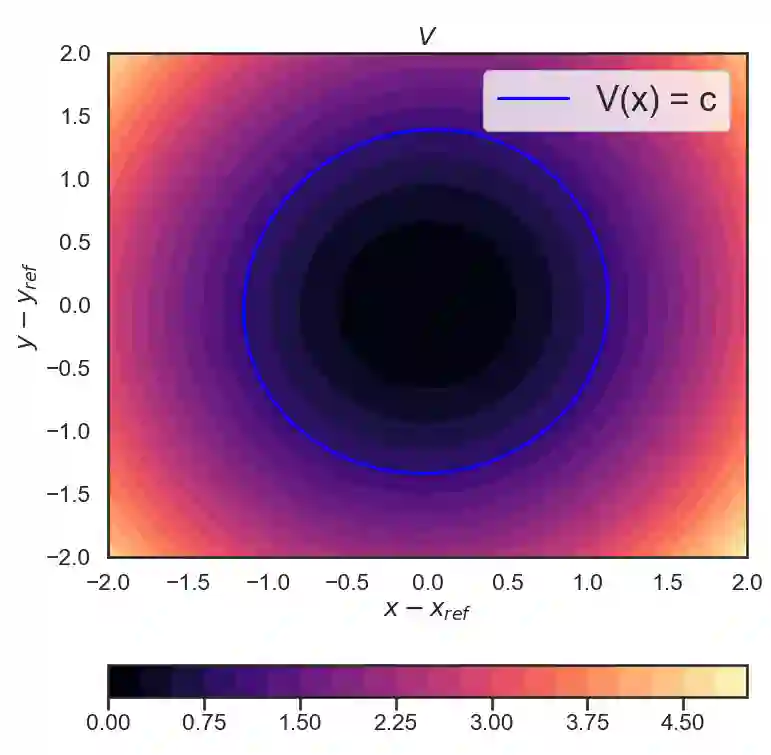
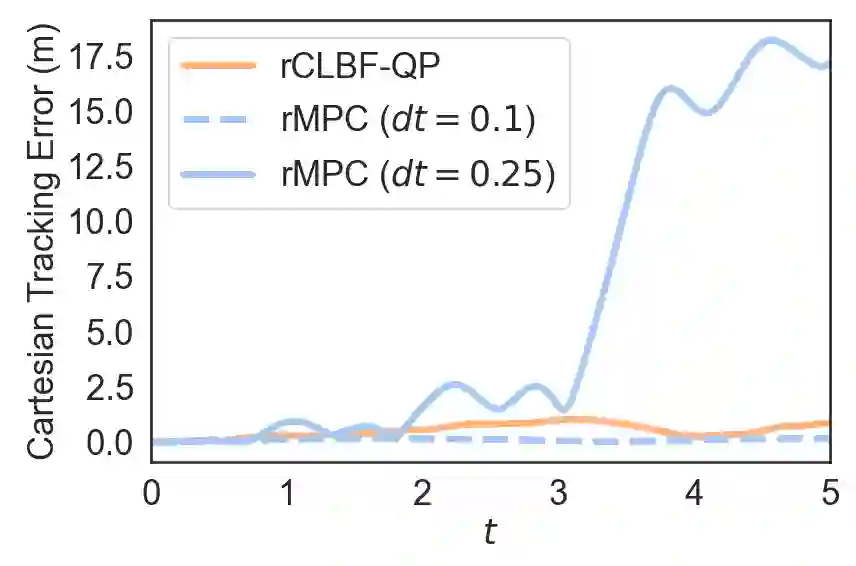
Safety and stability are common requirements for robotic control systems; however, designing safe, stable controllers remains difficult for nonlinear and uncertain models. We develop a model-based learning approach to synthesize robust feedback controllers with safety and stability guarantees. We take inspiration from robust convex optimization and Lyapunov theory to define robust control Lyapunov barrier functions that generalize despite model uncertainty. We demonstrate our approach in simulation on problems including car trajectory tracking, nonlinear control with obstacle avoidance, satellite rendezvous with safety constraints, and flight control with a learned ground effect model. Simulation results show that our approach yields controllers that match or exceed the capabilities of robust MPC while reducing computational costs by an order of magnitude.
翻译:安全和稳定是机器人控制系统的共同要求;然而,安全、稳定的控制器的设计对于非线性和不确定的模式来说仍然很困难。我们开发了一种基于模型的学习方法,将稳健的反馈控制器与安全和稳定的保证结合起来。我们从强健的convex优化和Lyapunov理论中得到灵感,以确定强有力的控制Lyapunov屏障功能,这些功能尽管模式不确定,却会普遍化。我们展示了我们模拟问题的方法,包括汽车轨迹跟踪、避免障碍的非线性控制、卫星会合与安全限制,以及飞行控制,并采用一个学习的地面效应模型。模拟结果显示,我们的方法使控制器与强健的MPC的能力相匹配或超过,同时将计算成本降低到一定数量。