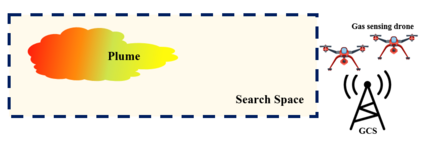
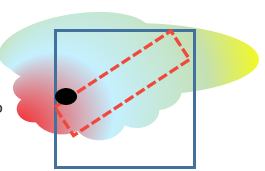
Uncontrolled emissions of gases from industrial accidents and disasters result in huge loss of life and property. Such extreme events require a quick and reliable survey of the site for effective rescue strategy planning. To achieve these goals, a network of unmanned aerial vehicles can be deployed that survey the affected region and identify safe and danger zones. Although single UAV-based systems for gas sensing applications are well-studied in literature, research on the deployment of a UAV network for such applications, which is more robust and fault tolerant, is still in infancy. The objective of this project is to design a system that can be deployed in emergency situations to provide a quick survey and identification of safe and dangerous zones in a given region that contains a toxic plume without making any assumptions about plume location. We focus on an end-to-end solution and formulate a two-phase strategy that can not only guarantee detection/acquisition of plume but also its characterization with high spatial resolution. To guarantee coverage of the region with a certain spatial resolution, we set up a vehicle routing problem. To overcome the limitations imposed by limited range of sensors and drone resources, we estimate the concentration map by using Gaussian kernel extrapolation. Finally, we evaluate the suggested framework in simulations. Our results suggest that this two-phase strategy not only gives better error performance but is also more efficient in terms of mission time. Moreover, the comparison between 2-phase random search and 2-phase uniform coverage suggest that the latter is better for single drone systems whereas for multiple drones the former gives reasonable performance at low computational cost.
翻译:工业事故和灾害产生的不受控制的气体排放导致巨大的生命和财产损失。这类极端事件要求迅速和可靠地调查现场,以便进行有效的救援战略规划。为了实现这些目标,可以部署无人驾驶飞行器网络,对受影响区域进行调查,并查明安全和危险区。虽然单一的无人驾驶航空飞行器应用气体遥感系统在文献中得到了很好地研究,但关于为此类应用部署无人驾驶航空飞行器网络的研究仍然处于初级阶段,这种网络更强大、更容错性强。该项目的目标是设计一个可在紧急情况下部署的系统,以提供对特定区域安全、危险地区的快速调查和识别,这种区域含有有毒羽流,而不对羽流位置作任何假设。我们侧重于一个端对端解决方案,并制定一个两阶段战略,不仅能保证探测/获取羽流,而且能以高空间分辨率定性。为了保证对区域进行某种空间分辨率的覆盖,我们设置了一个车辆路径问题。为了克服传感器和无人驾驶飞机资源范围有限的限制,我们通过使用Gaussian系统对含有有毒羽流的低密度区域安全、低密度区域进行快速勘测,我们估计其浓度地图,而使用Gauskerkerkerkereal的精确度的精确度也只是建议了前两个阶段的模拟分析。