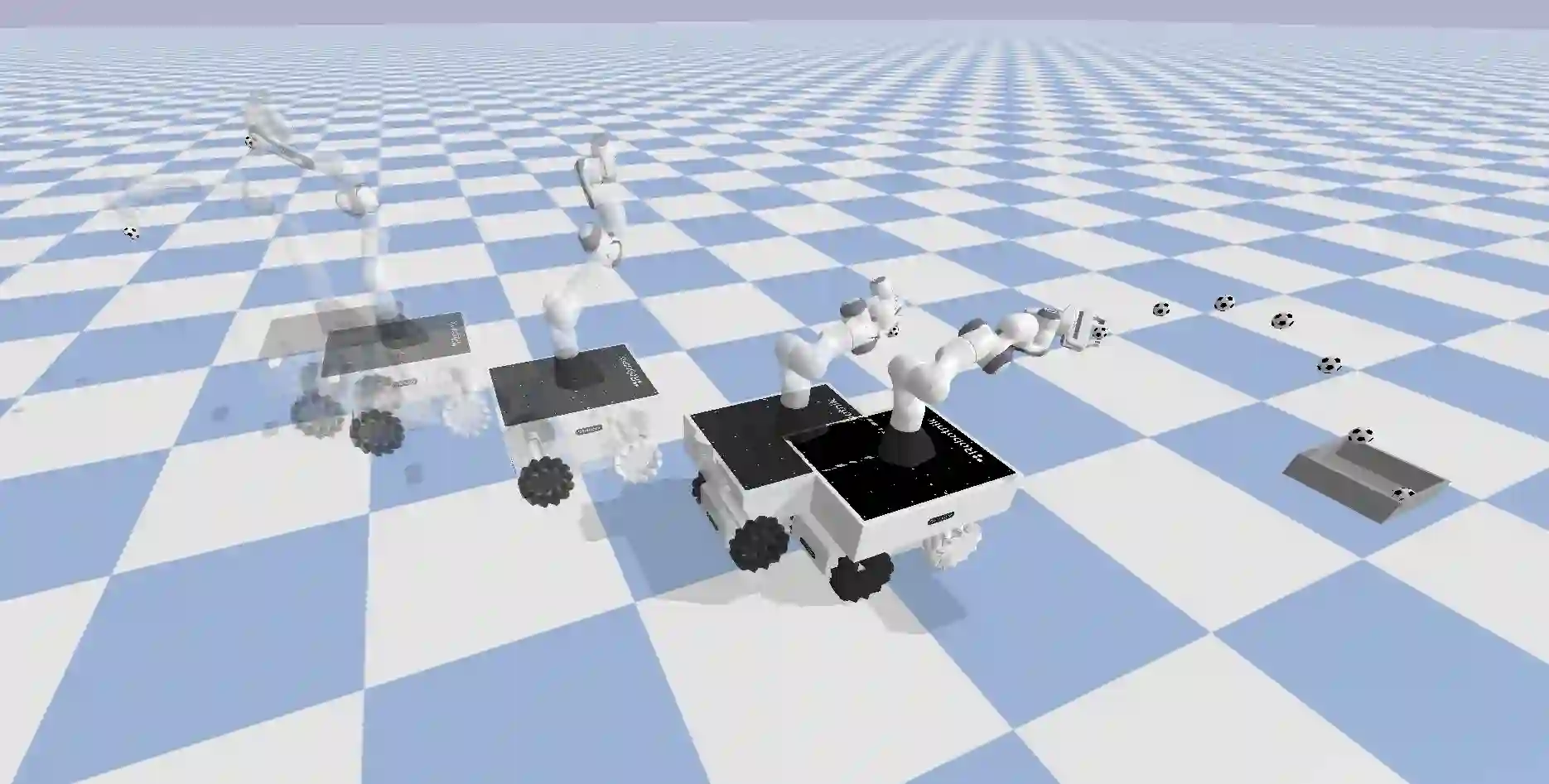
Mobile manipulator throwing is a promising method to increase the flexibility and efficiency of dynamic manipulation in factories. Its major challenge is to efficiently plan a feasible throw under a wide set of task specifications. We analyze the throwing problem and show that it can be reduced to a simpler planar problem, hence reducing greatly the computational costs. Using data analysis and machine learning, we build a model of the object's inverted flying dynamics and the robot's kinematic feasibility, which enables throwing motion generation in 1 ms given target position query. Due to the computational efficiency of our method, we show that, the system is adaptive when disturbed during task execution, via replanning on the fly to find out an alternative throw, instead of sticking to the original plan. Code is available at: https://github.com/liuyangdh/mobile-throwing
翻译:移动操纵器投掷是提高工厂动态操纵的灵活性和效率的一个很有希望的方法。 它的主要挑战是如何高效地规划在一系列广泛任务规格下可行的抛掷。 我们分析抛掷问题,并表明它可以降低为更简单的平板问题,从而大大降低计算成本。 我们利用数据分析和机器学习,建立了物体反向飞动动态和机器人动能可行性的模型,从而能够在1毫秒的范围内进行目标位置查询。 由于我们的方法的计算效率,我们显示,当任务执行期间受到干扰时,系统是适应性的,我们通过重新规划飞行来寻找替代扔出的方法,而不是坚持原计划。 代码可以在以下网址查阅: https://github.com/liuyangdh/mobile-throwing。 代码可以查到: https://github. com/liuyangdh/mobly-throwing