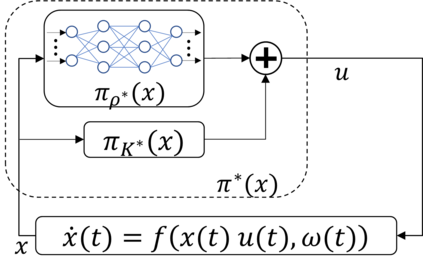
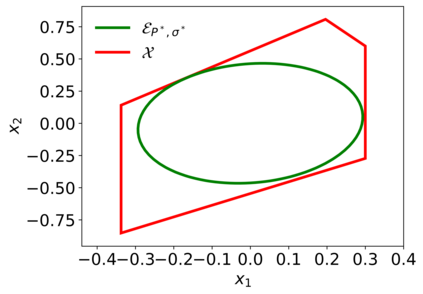
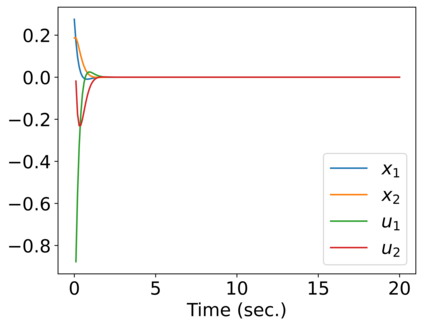
Stability certification and identifying a safe and stabilizing initial set are two important concerns in ensuring operational safety, stability, and robustness of dynamical systems. With the advent of machine-learning tools, these issues need to be addressed for the systems with machine-learned components in the feedback loop. To develop a general theory for stability and stabilizability of a neural network (NN)-controlled nonlinear system subject to bounded parametric variation, a Lyapunov-based stability certificate is proposed and is further used to devise a maximal Lipschitz bound for the NN controller, and also a corresponding maximal region-of-attraction (RoA) inside a given safe operating domain. To compute such a robustly stabilizing NN controller that also maximizes the system's long-run utility, a stability-guaranteed training (SGT) algorithm is proposed. The effectiveness of the proposed framework is validated through an illustrative example.
翻译:稳定认证和确定一个安全稳定的初始系统是确保动态系统运行安全、稳定和稳健的两个重要问题。随着机器学习工具的出现,这些问题对于在反馈循环中有机器学习组件的系统需要加以解决。要为神经网络控制的非线性系统的稳定性和可稳定性制定一个总体理论,并受约束参数变异的限制,建议使用基于Lyapunov的稳定性证书,并进一步用于为NN控制器设计一条最大距离的Lipschitz,并在给定的安全操作域内设计一个相应的最大吸引区域。要将这种稳健稳定的NNN控制器计算成一个也能够尽量扩大系统长期效用的稳健稳定控制器,就要提出一种稳定的、有保障的培训算法。提议的框架的有效性通过一个示例得到验证。