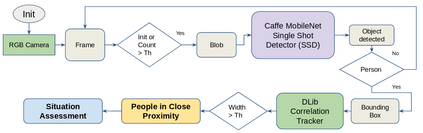
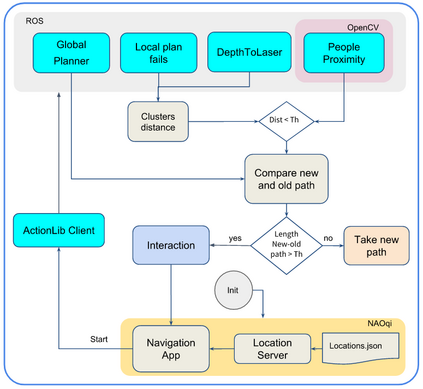
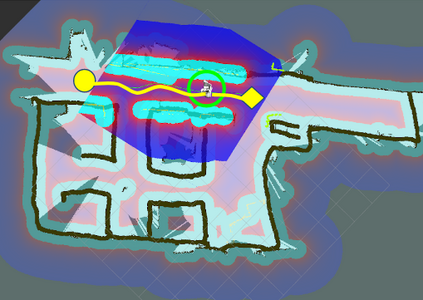
Over the last years, social robots have been deployed in public environments making evident the need of human-aware navigation capabilities. In this regard, the robotics community have made efforts to include proxemics or social conventions within the navigation approaches. Nevertheless, few works have tackled the problem of labelling humans as an interactive agent when blocking the robot motion trajectory. Current state of the art navigation planners will either propose an alternative path or freeze the motion until the path is free. We present the first prototype of a framework designed to enhance social competency of robots while navigating in indoor environments. The implementation is done using Navigation and Object Detection open-source software. Specifically, the Robot Operating System (ROS) navigation stack, and OpenCV with Caffe deep learning models and MobileNet Single Shot Detector (SSD), respectively.
翻译:过去几年来,在公共环境中部署了社会机器人,这表明需要人的认识导航能力,在这方面,机器人界已作出努力,将程序或社会惯例纳入导航方法,然而,在阻挡机器人运动轨迹时将人类贴上互动剂的标签方面,没有多少工作涉及将人类贴上互动剂的问题。目前,导航规划人员将提出替代路径,或冻结运动,直到道路自由为止。我们提出了第一个框架的原型,目的是提高机器人在室内航行时的社会能力。实施时使用了导航和物体探测开放源软件。具体来说,机器人操作系统(ROS)导航堆和带有卡夫深层学习模型的OpenCV和移动网络单一射击探测器(SSD)分别为OpenCV和OpenCV、Coffe深层学习模型和移动网络单一射击探测器(SD)。