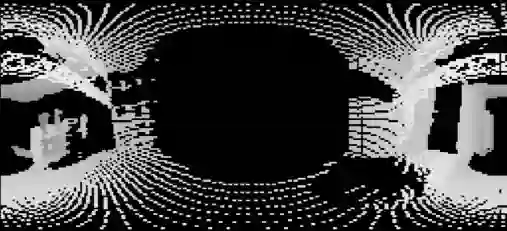
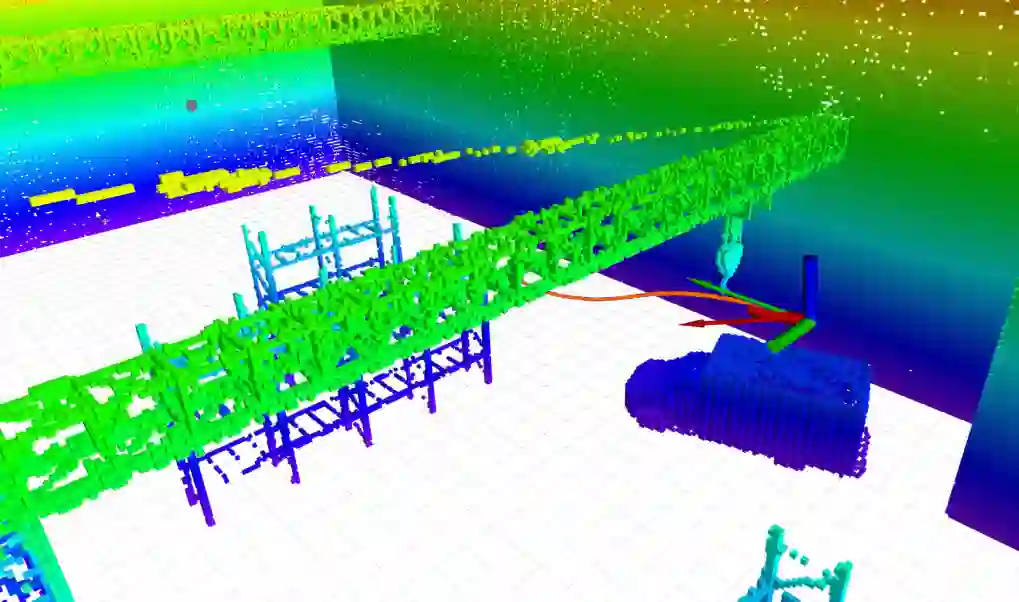
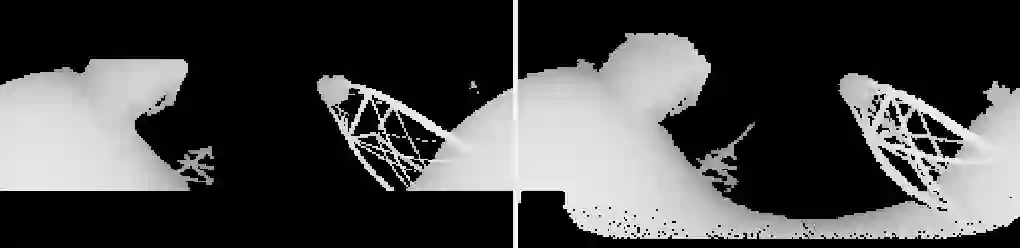
In recent years, unmanned aerial vehicles (UAVs) are used for numerous inspection and video capture tasks. Manually controlling UAVs in the vicinity of obstacles is challenging, however, and poses a high risk of collisions. Even for autonomous flight, global navigation planning might be too slow to react to newly perceived obstacles. Disturbances such as wind might lead to deviations from the planned trajectories. In this work, we present a fast predictive obstacle avoidance method that does not depend on higher-level localization or mapping and maintains the dynamic flight capabilities of UAVs. It directly operates on LiDAR range images in real time and adjusts the current flight direction by computing angular potential fields within the range image. The velocity magnitude is subsequently determined based on a trajectory prediction and time-to-contact estimation. Our method is evaluated using Hardware-in-the-Loop simulations. It keeps the UAV at a safe distance to obstacles, while allowing higher flight velocities than previous reactive obstacle avoidance methods that directly operate on sensor data.
翻译:近年来,无人驾驶飞行器(无人驾驶飞行器)被用于许多检查和视频捕捉任务。在障碍附近对无人驾驶飞行器进行人工控制具有挑战性,但具有很高的碰撞风险。即使自主飞行,全球导航规划也可能过于缓慢,无法对新发现的障碍作出反应。风等扰动可能导致偏离计划轨道。在这项工作中,我们提出了一个快速预测障碍避免方法,该方法不取决于更高层次的定位或绘图,并保持无人驾驶飞行器的动态飞行能力。它直接实时操作LIDAR射程图像,并通过在射程图中计算角潜在区域来调整当前飞行方向。随后根据轨迹预测和时间-接触估计确定速度大小。我们的方法将使用硬公用软件模拟法进行评估,将无人驾驶飞行器保持在安全距离以至障碍处,同时允许比以往直接操作传感器数据的被动障碍避免方法更高的飞行速度。