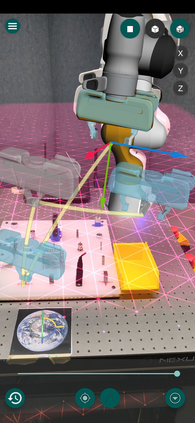
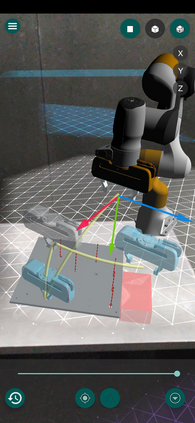
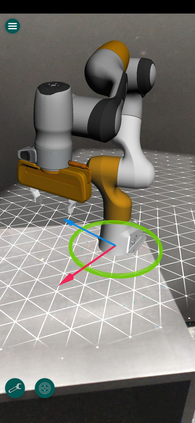
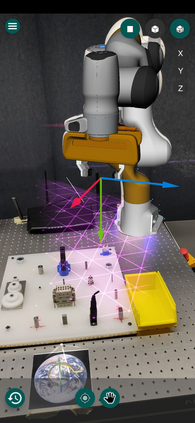
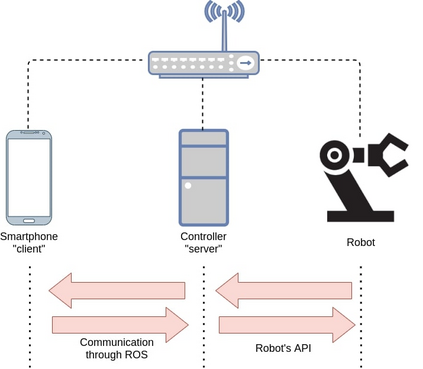
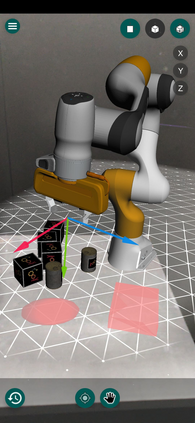
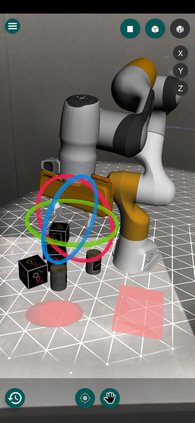
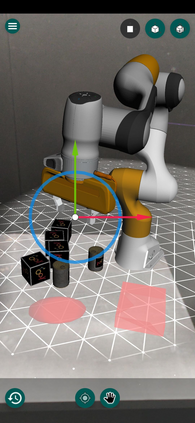
Robot programming methods for industrial robots are time consuming and often require operators to have knowledge in robotics and programming. To reduce costs associated with reprogramming, various interfaces using augmented reality have recently been proposed to provide users with more intuitive means of controlling robots in real-time and programming them without having to code. However, most solutions require the operator to be close to the real robot's workspace which implies either removing it from the production line or shutting down the whole production line due to safety hazards. We propose a novel augmented reality interface providing the users with the ability to model a virtual representation of a workspace which can be saved and reused to program new tasks or adapt old ones without having to be co-located with the real robot. Similar to previous interfaces, the operators then have the ability to program robot tasks or control the robot in real-time by manipulating a virtual robot. We evaluate the intuitiveness and usability of the proposed interface with a user study where 18 participants programmed a robot manipulator for a disassembly task.
翻译:工业机器人的机器人编程方法耗费时间,往往要求操作者掌握机器人和编程方面的知识。为了降低与重新编程有关的成本,最近提议采用扩大现实的各种界面,为用户提供更直观的实时控制机器人和编程工具,而无需编码即可实时控制机器人。然而,大多数解决方案要求操作者接近真正的机器人工作空间,这意味着将机器人从生产线上移除,或者由于安全危险而关闭整个生产线。我们提议建立一个新型的增强的现实界面,使用户有能力模拟一个可保存和再利用的工作空间的虚拟演示,或改造旧的工作空间,而不必与真正的机器人合用。类似以前的界面,操作者随后有能力通过操纵虚拟机器人来编程机器人任务或实时控制机器人。我们评估了拟议接口的本性和可用性,因为用户研究使18名参与者编程了机器人操纵器进行不协调的任务。